Data Types | |
| interface | fitpack_polar_boundary |
| interface | fitpack_swap |
| interface | fp_comm_expand |
| Expand communication buffer into allocatable arrays. More... | |
| interface | fp_comm_pack |
| Pack allocatable arrays into communication buffer. More... | |
| interface | fp_comm_size |
| Communication size for allocatable 1D arrays. More... | |
Functions/Subroutines | |
| pure integer(fp_size) function, dimension(d) | fp_grid_strides (d, sizes) |
| Row-major strides for a flat tensor of the given per-axis sizes. | |
| pure integer(fp_size) function | fp_grid_index (d, idx, strides) |
| Flat 0-based offset of a multi-index into a row-major tensor. | |
| pure integer(fp_size) function, dimension(d) | fp_grid_unravel (d, offset, sizes) |
| Multi-index of a flat 0-based offset into a row-major tensor (inverse of fp_grid_index). | |
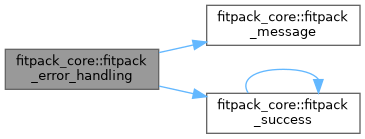
| subroutine, public | fitpack_error_handling (ierr, ierr_out, whereat) |
| Dispatch an error code: return it to caller or halt with a message. | |
| pure character(len=:) function, allocatable, public | fitpack_message (ierr) |
| Convert an integer error flag to a human-readable message string. | |
| subroutine, public | get_smoothing (old_smoothing, user_smoothing, nit, smooth_now) |
| Choose the smoothing parameter(s) for an iterative fit. | |
| pure character(len=:) function, allocatable, public | iopt_message (iopt) |
Convert an iopt computation-mode flag to a human-readable string. | |
| elemental logical(fp_bool) function, public | fitpack_success (ierr) |
| Test whether a FITPACK error flag indicates success. | |
| pure subroutine, public | bispev (tx, nx, ty, ny, c, kx, ky, x, mx, y, my, z, wrk, lwrk, iwrk, kwrk, ier) |
| Evaluate a bivariate spline on a rectangular grid. | |
| pure subroutine, public | clocur (iopt, ipar, idim, m, u, mx, x, w, k, s, nest, n, t, nc, c, fp, wrk, lwrk, iwrk, ier) |
| Determine a smooth closed parametric spline curve approximation. | |
| pure subroutine, public | cocosp (m, x, y, w, n, t, e, maxtr, maxbin, c, sq, sx, bind, wrk, lwrk, iwrk, kwrk, ier) |
| Fit a cubic spline with convexity/concavity constraints and user-specified knots. | |
| pure subroutine, public | concon (iopt, m, x, y, w, v, s, nest, maxtr, maxbin, n, t, c, sq, sx, bind, wrk, lwrk, iwrk, kwrk, ier) |
| Fit a cubic spline with convexity/concavity constraints and automatic knot placement. | |
| pure subroutine, public | concur (iopt, idim, m, u, mx, x, xx, w, ib, db, nb, ie, de, ne, k, s, nest, n, t, nc, c, np, cp, fp, wrk, lwrk, iwrk, ier) |
| Determine a smooth parametric spline curve with derivative constraints at endpoints. | |
| pure subroutine, public | cualde (idim, t, n, c, nc, k1, u, d, nd, ier) |
| Evaluate all derivatives of a parametric spline curve at a single point. | |
| pure subroutine, public | curev (idim, t, n, c, nc, k, u, m, x, mx, ier) |
| Evaluate a parametric spline curve at a set of parameter values. | |
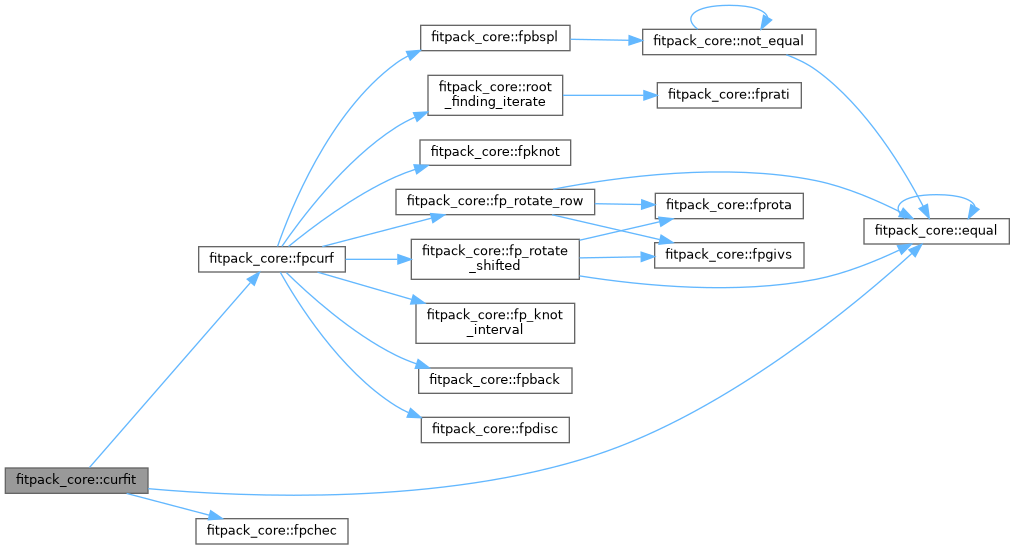
| pure subroutine, public | curfit (iopt, m, x, y, w, xb, xe, k, s, nest, n, t, c, fp, wrk, lwrk, iwrk, ier) |
| Determine a smooth spline approximation of degree \( k \) to a set of data points. | |
| pure real(fp_real) function, public | dblint (dims, t, n, c, k, xb, xe) |
| Integral of a tensor-product spline over an axis-aligned box (any dimension). | |
| pure real(fp_real) function, public | evapol (tu, nu, tv, nv, c, rad, x, y) |
| Evaluate a polar spline \( f(x,y) = s(u,v) \) at a Cartesian point. | |
| pure subroutine, public | fourco (t, n, c, alfa, m, ress, resc, wrk1, wrk2, ier) |
| Compute Fourier coefficients of a cubic spline. | |
| pure subroutine | fpader (t, n, c, k1, x, l, d) |
| Evaluate all derivatives of a spline at a single point. | |
| pure subroutine | fpadno (maxtr, up, left, right, info, count, merk, jbind, n1, ier) |
| Add a branch to the constraint-set binary tree. | |
| pure subroutine | fpadpo (idim, t, n, c, nc, k, cp, np, cc, t1, t2) |
| Add a polynomial curve to a spline curve in B-spline representation. | |
| pure real(fp_real) function, dimension(n) | fpback (a, z, n, k, nest) |
| Solve an upper triangular banded system by back-substitution. | |
| pure real(fp_real) function, dimension(n) | fpbacp (a, b, z, n, k, k1, nest) |
| Solve a bordered upper triangular system by back-substitution. | |
| pure subroutine | fpbfou (t, n, par, ress, resc) |
| Compute Fourier coefficients of cubic B-splines. | |
| pure subroutine, public | fpndsp (dims, t, n, c, k, xg, m, z, w, lidx) |
| Evaluate a tensor-product spline on a grid (any dimension; bispev's kernel). | |
| pure subroutine, public | ndspev (dims, t, n, c, k, xg, m, z, wrk, lwrk, iwrk, kwrk, ier) |
| N-D generalization of bispev: evaluate a tensor-product spline on a grid. | |
| pure subroutine, public | ndspeu (dims, t, n, c, k, xg, m, z, ier) |
| Evaluate a tensor-product spline at scattered points (any dimension). | |
| pure real(fp_real) function, dimension(max_order+1) | fpbspl (t, n, k, x, l) |
| Evaluate the non-zero B-splines at a given point. | |
| pure integer(fp_size) function | fp_knot_interval (t, x, l_start, l_max) |
| Find knot interval index l such that t(l) <= x < t(l+1). Uses hybrid search: linear for small ranges, binary for large. This replaces the repeated pattern: do while (x >= t(l+1) .and. l /= l_max) l = l + 1 end do. | |
| pure integer(fp_flag) function | fpchec (x, m, t, n, k) |
| Verify knot positions against data points (Schoenberg-Whitney check). | |
| pure integer function | fpched (x, m, t, n, k, ib, ie) |
| Verify knot positions for a constrained spline (Schoenberg-Whitney check). | |
| pure integer(fp_flag) function | fpchep (x, m, t, n, k) |
| Verify knot positions for a periodic spline (Schoenberg-Whitney check). | |
| pure subroutine | fpclos (iopt, idim, m, u, mx, x, w, k, s, nest, tol, maxit, k1, k2, n, t, nc, c, fp, fpint, z, a1, a2, b, g1, g2, q, nrdata, ier) |
| Core algorithm for closed (periodic) parametric curve fitting. | |
| pure subroutine | fpclos_reset_interp (idim, k, m, mx, n, nc, nest, kk, kk1, u, x, t, c, fp, per, fp0, s, fpint, nrdata, done) |
| Set up the initial knot configuration for closed-curve interpolation. | |
| pure subroutine | fpcoco (iopt, m, x, y, w, v, s, nest, maxtr, maxbin, n, t, c, sq, sx, bind, e, wrk, lwrk, iwrk, kwrk, ier) |
| Fit a convexity-constrained cubic smoothing spline. | |
| pure subroutine | fpcons (iopt, idim, m, u, mx, x, w, ib, ie, k, s, nest, tol, maxit, k1, k2, n, t, nc, c, fp, fpint, z, a, b, g, q, nrdata, ier) |
| Core algorithm for constrained parametric curve fitting. | |
| pure subroutine | fpcosp (m, x, y, w, n, t, e, maxtr, maxbin, c, sq, sx, bind, nm, mb, a, b, const, z, zz, u, q, info, up, left, right, jbind, ibind, ier) |
| Core algorithm for convexity-constrained cubic spline fitting. | |
| pure elemental subroutine | fpcsin (a, b, par, sia, coa, sib, cob, ress, resc) |
| Compute weighted Fourier integrals of a cubic polynomial. | |
| pure subroutine | fpcurf (iopt, x, y, w, m, xb, xe, k, s, nest, tol, maxit, k1, k2, n, t, c, fp, fpint, z, a, b, g, q, nrdata, ier) |
| Core algorithm for univariate spline curve fitting. | |
| pure subroutine | fpcuro (a, b, c, d, x, n) |
| Find the real zeros of a cubic polynomial. | |
| pure subroutine | fpcyt1 (a, n, nn) |
| LU-decompose a cyclic tridiagonal matrix. | |
| pure subroutine | fpcyt2 (a, n, b, c, nn) |
| Solve a cyclic tridiagonal system using LU factors from fpcyt1. | |
| pure subroutine | fpdeno (maxtr, up, left, right, nbind, merk) |
| Prune short branches from the constraint-set binary tree. | |
| pure subroutine | fpdisc (t, n, k2, b, nest) |
| Compute the discontinuity jumps of the B-spline derivatives. | |
| pure subroutine | fpfrno (maxtr, up, left, right, info, point, merk, n1, count, ier) |
| Collect free nodes from the constraint-set binary tree. | |
| elemental subroutine | fpgivs (piv, ww, cos, sin) |
| Compute parameters of a Givens plane rotation. | |
| pure subroutine | fp_rotate_row (h, band, a, yi, z, j_start) |
| Rotate an observation row into the upper triangular band matrix. | |
| pure subroutine | fp_rotate_row_vec (h, band, a, nest, xi, z, j_start, n, idim) |
| Rotate an observation row into a band matrix with vector RHS. | |
| pure subroutine | fp_rotate_shifted (h, band, a, nest, yi, z, j_start, j_end) |
| Rotate a smoothing-matrix row into a band matrix using shifted pivots. | |
| pure subroutine | fp_rotate_shifted_vec (h, band, a, nest, xi, z, j_start, j_end, n, idim) |
| Rotate a smoothing-matrix row into a band matrix with vector RHS. | |
| pure subroutine | fp_rotate_row_2mat_vec (h1, band1, h2, band2, a1, a2, nest, xi, z, j1_start, j1_end, n, idim) |
| Rotate a split observation row into the block-triangular periodic system with vector RHS. | |
| pure subroutine | fp_rotate_row_2mat (h1, band1, h2, band2, a1, a2, nest, yi, z, j1_start, j1_end) |
| Rotate a split observation row into the block-triangular periodic system with scalar RHS. | |
| pure subroutine | fp_rotate_row_block (h, band, a, na, right, q, nrhs, irot_start) |
| Rotate a row into a band matrix with contiguous-block RHS. | |
| pure subroutine | fp_rotate_row_stride (h, band, a, na, right, c, ldc, nrhs, irot_start) |
| Rotate a row into a band matrix with stride (row-access) RHS. | |
| pure subroutine | fp_rotate_2mat_stride (h1, band1, h2, band2, a1, a2, na, right, c, ldc, nrhs, j1_start, j1_end) |
| Rotate a split row into the block-triangular periodic system with stride RHS. | |
| pure subroutine | fpgrdi (ifsu, ifsv, ifbu, ifbv, lback, u, mu, v, mv, z, mz, dz, iop0, iop1, tu, nu, tv, nv, p, c, nc, sq, fp, fpu, fpv, mm, mvnu, spu, spv, right, q, au, av1, av2, bu, bv, aa, bb, cc, cosi, nru, nrv) |
| Compute spline coefficients on a polar/spherical grid via Kronecker product. | |
| pure subroutine | fpgrpa (ifsu, ifsv, ifbu, ifbv, idim, ipar, u, mu, v, mv, z, mz, tu, nu, tv, nv, p, c, nc, fp, fpu, fpv, mm, mvnu, spu, spv, right, q, au, au1, av, av1, bu, bv, nru, nrv) |
| Compute parametric surface spline coefficients on a grid. | |
| pure subroutine | fpgrre (dims, ifs, ifb, xg, m, z, k, t, n, p, c, nc, fp, fpint, mm, mynx, sp, right, q, a, b, nr) |
Tensor-product least-squares gridded solver for dims dimensions. | |
| pure subroutine | fpgrsp (ifsu, ifsv, ifbu, ifbv, lback, u, mu, v, mv, r, mr, dr, iop0, iop1, tu, nu, tv, nv, p, c, nc, sq, fp, fpu, fpv, mm, mvnu, spu, spv, right, q, au, av1, av2, bu, bv, a0, a1, b0, b1, c0, c1, cosi, nru, nrv) |
| Compute spherical grid spline coefficients via Kronecker product. | |
| pure subroutine | fpinst (iopt, t, n, c, k, x, l, tt, nn, cc, nest) |
| Insert a single knot into a B-spline representation. | |
| pure subroutine | fpintb (t, n, bint, nk1, x, y) |
| Compute definite integrals of the normalized B-splines. | |
| pure subroutine | fpknot (x, m, t, n, fpint, nrdata, nrint, nest, istart) |
| Select and insert a new knot at the location of maximum residual. | |
| pure subroutine | fpopdi (ifsu, ifsv, ifbu, ifbv, u, mu, v, mv, z, mz, z0, dz, iopt, ider, tu, nu, tv, nv, nuest, nvest, p, step, c, nc, fp, fpu, fpv, nru, nrv, wrk, lwrk) |
| Compute smoothing spline on a polar grid with origin constraints. | |
| pure subroutine | fpopsp (ifsu, ifsv, ifbu, ifbv, u, mu, v, mv, r, mr, r0, r1, dr, iopt, ider, tu, nu, tv, nv, nuest, nvest, p, step, c, nc, fp, fpu, fpv, nru, nrv, wrk, lwrk) |
| Compute smoothing spline on a spherical grid with pole constraints. | |
| pure subroutine | fporde (x, y, m, kx, ky, tx, nx, ty, ny, nummer, index, nreg) |
| Sort scattered data points into rectangular panels. | |
| pure subroutine | fppara (iopt, idim, m, u, mx, x, w, ub, ue, k, s, nest, tol, maxit, k1, k2, n, t, nc, c, fp, fpint, z, a, b, g, q, nrdata, ier) |
| Core algorithm for open parametric curve fitting. | |
| pure subroutine | fppasu (iopt, ipar, idim, u, mu, v, mv, z, mz, s, nuest, nvest, tol, maxit, nc, nu, tu, nv, tv, c, fp, fp0, fpold, reducu, reducv, fpintu, fpintv, lastdi, nplusu, nplusv, nru, nrv, nrdatu, nrdatv, wrk, lwrk, ier) |
| Core algorithm for parametric surface fitting on a grid. | |
| pure subroutine | fpperi (iopt, x, y, w, m, k, s, nest, tol, maxit, k1, k2, n, t, c, fp, fpint, z, a1, a2, b, g1, g2, q, nrdata, ier) |
| Core algorithm for univariate periodic spline fitting. | |
| pure subroutine | fpperi_reset_interp (k, m, n, nest, kk, kk1, x, y, t, c, fp, per, fp0, s, fpint, nrdata, done) |
| Set up the initial knot configuration for periodic spline interpolation. | |
| pure subroutine | fppocu (idim, k, a, b, ib, db, nb, ie, de, ne, cp, np) |
| Construct a polynomial curve satisfying endpoint derivative constraints. | |
| pure subroutine | fppogr (iopt, ider, u, mu, v, mv, z, mz, z0, r, s, nuest, nvest, tol, maxit, nc, nu, tu, nv, tv, c, fp, fp0, fpold, reducu, reducv, fpintu, fpintv, dz, step, lastdi, nplusu, nplusv, lasttu, nru, nrv, nrdatu, nrdatv, wrk, lwrk, ier) |
| Driver for polar grid smoothing spline with knot selection. | |
| pure subroutine | fppola (iopt1, iopt2, iopt3, m, u, v, z, w, rad, s, nuest, nvest, eta, tol, maxit, ib1, ib3, nc, ncc, intest, nrest, nu, tu, nv, tv, c, fp, sup, fpint, coord, f, ff, row, cs, cosi, a, q, bu, bv, spu, spv, h, index, nummer, wrk, lwrk, ier) |
| Core algorithm for spline fitting on a polar domain. | |
| elemental subroutine | root_finding_iterate (p1, f1, p2, f2, p3, f3, p, fpms, acc, check1, check3, success) |
| Update the smoothing parameter \( p \) during iterative knot selection. | |
| pure subroutine | fprank (a, f, n, m, na, tol, c, sq, rank, aa, ff, h) |
| Compute the minimum-norm least-squares solution under rank deficiency. | |
| elemental subroutine | fprati (p1, f1, p2, f2, p3, f3, p) |
| Rational interpolation for the smoothing parameter search. | |
| pure subroutine | fpregr (iopt, dims, xg, m, z, lo, hi, k, s, nest, tol, maxit, nc, n, t, c, fp, fp0, fpold, reduc, lastdi, nplus, fpint, nr, nrdat, sp, right, q, a, b, ier) |
Knot determination + p-iteration for dims-dimensional gridded fits. | |
| elemental integer function | new_knot_dimension (n1, n1add, n1max, n2, n2add, n2max, last) |
| Choose which dimension receives the next knot during bivariate fitting. | |
| pure integer(fp_size) function | new_knot_dimension_nd (dims, n, npl, ne) |
| Choose which axis gets the next knots (N-D form of new_knot_dimension). | |
| elemental subroutine | fprota (cos, sin, a, b) |
| Apply a Givens plane rotation to two scalars. | |
| pure subroutine | fprppo (nu, nv, if1, if2, cosi, ratio, c, f, ncoff) |
| Convert constrained polar spline coefficients to standard form. | |
| pure subroutine | fprpsp (nt, np, co, si, c, f, ncoff) |
| Convert constrained spherical spline coefficients to standard form. | |
| pure subroutine | fpseno (maxtr, up, left, right, info, merk, ibind, nbind) |
| Fetch and advance to the next branch in the constraint-set tree. | |
| pure subroutine | fpspgr (iopt, ider, u, mu, v, mv, r, mr, r0, r1, s, nuest, nvest, tol, maxit, nc, nu, tu, nv, tv, c, fp, fp0, fpold, reducu, reducv, fpintu, fpintv, dr, step, lastdi, nplusu, nplusv, lastu0, lastu1, nru, nrv, nrdatu, nrdatv, wrk, lwrk, ier) |
| Driver for spherical grid smoothing spline with knot selection. | |
| pure subroutine | fpsphe (iopt, m, teta, phi, r, w, s, ntest, npest, eta, tol, maxit, ib1, ib3, nc, ncc, intest, nrest, nt, tt, np, tp, c, fp, sup, fpint, coord, f, ff, row, coco, cosi, a, q, bt, bp, spt, spp, h, index, nummer, wrk, lwrk, ier) |
| Core algorithm for spline fitting on the sphere. | |
| pure subroutine | fpsuev (idim, tu, nu, tv, nv, c, u, mu, v, mv, f, wu, wv, lu, lv) |
| Evaluate a parametric bicubic tensor-product spline surface. | |
| pure subroutine | fpsurf (iopt, m, x, y, z, w, xb, xe, yb, ye, kxx, kyy, s, nxest, nyest, eta, tol, maxit, nmax, km1, km2, ib1, ib3, nc, intest, nrest, nx0, tx, ny0, ty, c, fp, fp0, fpint, coord, f, ff, a, q, bx, by, spx, spy, h, index, nummer, wrk, lwrk, ier) |
| Core algorithm for bivariate tensor-product spline surface fitting. | |
| pure subroutine | fpsysy (a, n, g) |
| Solve a small symmetric linear system by Cholesky factorization. | |
| pure subroutine | fptrnp (m, mm, idim, n, nr, sp, p, b, z, a, q, right) |
| Triangularize the tensor-product system for non-periodic grids. | |
| pure subroutine | fptrpe (m, mm, idim, n, nr, sp, p, b, z, a, aa, q, right) |
| Triangularize the tensor-product system for periodic grids. | |
| pure subroutine, public | insert (iopt, t, n, c, k, x, tt, nn, cc, nest, ier) |
| Insert a single knot into a spline, returning a new B-spline representation. | |
| pure subroutine, public | insert_inplace (iopt, t, n, c, k, x, nest, ier) |
| Insert a single knot into a spline in place (avoiding aliasing issues). | |
| pure subroutine, public | parcur (iopt, ipar, idim, m, u, mx, x, w, ub, ue, k, s, nest, n, t, nc, c, fp, wrk, lwrk, iwrk, ier) |
| Determine a smooth parametric spline curve approximation. | |
| pure subroutine, public | pardtc (dims, t, n, c, k, nu, newc, ier) |
| B-spline coefficients of a partial-derivative spline (any dimension). | |
| pure subroutine, public | parder (dims, t, n, c, k, nu, xg, m, z, wrk, lwrk, iwrk, kwrk, ier) |
| Evaluate a partial derivative of a tensor-product spline on a grid (any dimension). | |
| pure subroutine, public | pardeu (dims, t, n, c, k, nu, xg, m, z, wrk, lwrk, ier) |
| Evaluate a partial derivative of a tensor-product spline at scattered points (any dimension). | |
| pure subroutine, public | parsur (iopt, ipar, idim, mu, u, mv, v, f, s, nuest, nvest, nu, tu, nv, tv, c, fp, wrk, lwrk, iwrk, kwrk, ier) |
| Fit a smooth parametric surface to gridded data. | |
| pure subroutine, public | percur (iopt, m, x, y, w, k, s, nest, n, t, c, fp, wrk, lwrk, iwrk, ier) |
| Determine a smooth periodic spline approximation to data. | |
| subroutine, public | pogrid (iopt, ider, mu, u, mv, v, z, z0, r, s, nuest, nvest, nu, tu, nv, tv, c, fp, wrk, lwrk, iwrk, kwrk, ier) |
| Fit a smooth bivariate spline to gridded data on a polar (disc) domain. | |
| pure subroutine, public | polar (iopt, m, x, y, z, w, rad, s, nuest, nvest, eps, nu, tu, nv, tv, u, v, c, fp, wrk1, lwrk1, wrk2, lwrk2, iwrk, kwrk, ier) |
| Fit a smooth bivariate spline to scattered data on a polar domain. | |
| pure subroutine, public | profil (ax, dims, t, n, c, k, u, cu, ier) |
| Cross-section of a tensor-product spline: fix one axis (any dimension). | |
| pure subroutine, public | regrid (iopt, dims, m, xg, z, lo, hi, k, s, nest, n, t, c, fp, wrk, lwrk, iwrk, kwrk, ier) |
Tensor-product gridded smoothing-spline fit driver for any domain dimension dims. | |
| pure subroutine, public | spalde (t, n, c, k1, x, d, ier) |
| Evaluate all derivatives of a spline at a single point. | |
| pure subroutine, public | spgrid (iopt, ider, mu, u, mv, v, r, r0, r1, s, nuest, nvest, nu, tu, nv, tv, c, fp, wrk, lwrk, iwrk, kwrk, ier) |
| Fit a smooth bivariate spline to gridded data on a sphere (latitude-longitude grid). | |
| pure subroutine, public | sphere (iopt, m, teta, phi, r, w, s, ntest, npest, eps, nt, tt, np, tp, c, fp, wrk1, lwrk1, wrk2, lwrk2, iwrk, kwrk, ier) |
| Fit a smooth bicubic spherical spline to scattered data on a sphere. | |
| pure subroutine, public | splder (t, n, c, k, nu, x, y, m, e, wrk, ier) |
| Evaluate the \( \nu \)-th derivative of a spline \( s(x) \) at a set of points. | |
| pure subroutine, public | splev (t, n, c, k, x, y, m, e, ier) |
| Evaluate a spline \( s(x) \) of degree \( k \) at a set of points. | |
| real(fp_real) function, public | splint (t, n, c, k, a, b, wrk) |
| Compute the definite integral of a spline \( s(x) \) over \( [a, b] \). | |
| pure subroutine, public | sproot (t, n, c, zeros, mest, m, ier) |
| Find the zeros of a cubic spline \( s(x) \) given in B-spline representation. | |
| pure subroutine, public | surev (idim, tu, nu, tv, nv, c, u, mu, v, mv, f, mf, wrk, lwrk, iwrk, kwrk, ier) |
| Evaluate a parametric bicubic spline surface on a grid. | |
| pure subroutine, public | surfit (iopt, m, x, y, z, w, xb, xe, yb, ye, kx, ky, s, nxest, nyest, nmax, eps, nx, tx, ny, ty, c, fp, wrk1, lwrk1, wrk2, lwrk2, iwrk, kwrk, ier) |
| Fit a smoothing bivariate spline to scattered data. | |
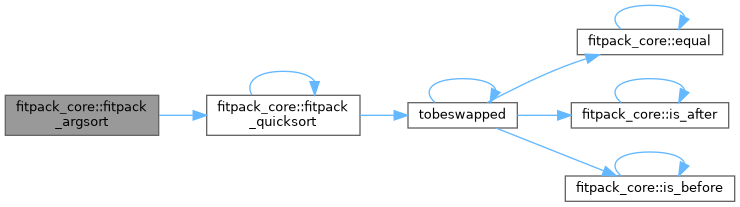
| pure integer(fp_size) function, dimension(size(list)), public | fitpack_argsort (list) |
| Return the permutation indices that would sort an array. | |
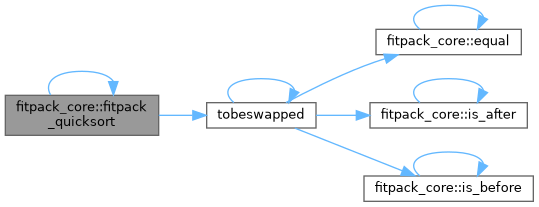
| pure recursive subroutine | fitpack_quicksort (list, ilist, down) |
| In-place quicksort with optional index tracking. | |
| elemental subroutine | swap_data (a, b) |
| Swap two real values in place. | |
| elemental subroutine | swap_size (a, b) |
| Swap two integer values in place. | |
| elemental logical(fp_bool) function | is_before (a, b) |
| Test \( a < b \) (strict less-than). | |
| elemental logical(fp_bool) function | is_after (a, b) |
| Test \( a > b \) (strict greater-than). | |
| elemental logical(fp_bool) function | is_ge (a, b) |
| Test \( a \ge b \). | |
| elemental logical(fp_bool) function | is_le (a, b) |
| Test \( a \le b \). | |
| elemental logical(fp_bool) function, public | equal (a, b) |
| Test whether two reals are equal within machine precision. | |
| elemental logical(fp_bool) function | not_equal (a, b) |
| Test whether two reals differ beyond machine precision. | |
| elemental integer(fp_size) function, public | fp_rcomms_per_bits (nbits) |
| Number of FP_COMM elements required to store nbits of data. | |
| pure integer(fp_size) function | fp_real_comm_size_1d (array) |
| Calculate storage size for 1D real(FP_REAL) allocatable array Header: 1 FP_COMM storing bounds as 2 int32 (or NOT_ALLOC marker) Data: raw transfer of array contents. | |
| pure integer(fp_size) function | fp_real_comm_size_2d (array) |
| Calculate storage size for 2D real(FP_REAL) allocatable array. | |
| pure integer(fp_size) function | fp_real_comm_size_3d (array) |
| Calculate storage size for 3D real(FP_REAL) allocatable array. | |
| pure integer(fp_size) function | fp_size_comm_size_1d (array) |
| Calculate storage size for 1D integer(FP_SIZE) allocatable array. | |
| pure subroutine | fp_real_comm_pack_1d (array, buffer) |
| Pack 1D real(FP_REAL) allocatable array into communication buffer. | |
| pure subroutine | fp_real_comm_pack_2d (array, buffer) |
| Pack 2D real(FP_REAL) allocatable array into communication buffer. | |
| pure subroutine | fp_real_comm_pack_3d (array, buffer) |
| Pack 3D real(FP_REAL) allocatable array into communication buffer. | |
| pure subroutine | fp_size_comm_pack_1d (array, buffer) |
| Pack 1D integer(FP_SIZE) allocatable array into communication buffer. | |
| pure subroutine | fp_real_comm_expand_1d (array, buffer) |
| Expand communication buffer into 1D real(FP_REAL) allocatable array. | |
| pure subroutine | fp_real_comm_expand_2d (array, buffer) |
| Expand communication buffer into 2D real(FP_REAL) allocatable array. | |
| pure subroutine | fp_real_comm_expand_3d (array, buffer) |
| Expand communication buffer into 3D real(FP_REAL) allocatable array. | |
| pure subroutine | fp_size_comm_expand_1d (array, buffer) |
| Expand communication buffer into 1D integer(FP_SIZE) allocatable array. | |
| pure integer(fp_size) function | fp_bool_comm_size_1d (array) |
| Calculate storage size for 1D logical(FP_BOOL) allocatable array. | |
| pure subroutine | fp_bool_comm_pack_1d (array, buffer) |
| Pack 1D logical(FP_BOOL) allocatable array into communication buffer. | |
| pure subroutine | fp_bool_comm_expand_1d (array, buffer) |
| Expand communication buffer into 1D logical(FP_BOOL) allocatable array. | |
Variables | |
| integer, parameter, public | fp_real = c_double |
| integer, parameter, public | fp_size = c_int32_t |
| integer, parameter, public | fp_flag = c_int32_t |
| integer, parameter, public | fp_bool = c_bool |
| integer, parameter, public | fp_comm = c_double |
| integer, parameter, public | fp_dim = c_int32_t |
| integer(fp_size), parameter | fp_not_alloc = -99999999_FP_SIZE |
| Marker for unallocated arrays in communication buffers. | |
| integer(fp_flag), parameter, public | outside_extrapolate = 0 |
| integer(fp_flag), parameter, public | outside_zero = 1 |
| integer(fp_flag), parameter, public | outside_not_allowed = 2 |
| integer(fp_flag), parameter, public | outside_nearest_bnd = 3 |
| integer(fp_flag), parameter, public | iopt_new_leastsquares = -1 |
| integer(fp_flag), parameter, public | iopt_new_smoothing = 0 |
| integer(fp_flag), parameter, public | iopt_old_fit = 1 |
| integer(fp_size), parameter, public | max_idim = 10 |
| integer(fp_dim), dimension(max_idim), parameter, public | idims = [1,2,3,4,5,6,7,8,9,10] |
| integer(fp_flag), parameter, public | knot_dim_none = 0 |
| integer(fp_flag), parameter, public | knot_dim_1 = 1 |
| integer(fp_flag), parameter, public | knot_dim_2 = 2 |
| integer(fp_size), parameter, public | max_order = 19 |
| integer(fp_size), parameter, public | degree_3 = 3 |
| integer(fp_size), parameter, public | degree_4 = 4 |
| integer(fp_size), parameter, public | degree_5 = 5 |
| integer(fp_flag), parameter, public | fitpack_ok = 0 |
| integer(fp_flag), parameter, public | fitpack_interpolating_ok = -1 |
| integer(fp_flag), parameter, public | fitpack_leastsquares_ok = -2 |
| integer(fp_flag), parameter, public | fitpack_insufficient_storage = 1 |
| integer(fp_flag), parameter, public | fitpack_s_too_small = 2 |
| integer(fp_flag), parameter, public | fitpack_maxit = 3 |
| integer(fp_flag), parameter, public | fitpack_too_many_knots = 4 |
| integer(fp_flag), parameter, public | fitpack_overlapping_knots = 5 |
| integer(fp_flag), parameter, public | fitpack_invalid_range = 6 |
| integer(fp_flag), parameter, public | fitpack_input_error = 10 |
| integer(fp_flag), parameter, public | fitpack_test_error = 11 |
| integer(fp_flag), parameter, public | fitpack_invalid_constraint = 12 |
| integer(fp_flag), parameter, public | fitpack_insufficient_knots = 13 |
| integer(fp_flag), parameter, public | concon_maxbin = 14 |
| integer(fp_flag), parameter, public | concon_maxtr = 15 |
| integer(fp_flag), parameter, public | concon_qp_fail = 16 |
| logical(fp_bool), parameter, public | fp_true = .true._FP_BOOL |
| logical(fp_bool), parameter, public | fp_false = .false._FP_BOOL |
| integer(fp_size), parameter | izero = 0_FP_SIZE |
| integer(fp_size), parameter | ione = 1_FP_SIZE |
| integer(fp_size), parameter | itwo = 2_FP_SIZE |
| integer(fp_size), parameter | ithree = 3_FP_SIZE |
| integer(fp_size), parameter | ifour = 4_FP_SIZE |
| integer(fp_size), parameter | ifive = 5_FP_SIZE |
| real(fp_real), parameter, public | one = 1.0_FP_REAL |
| real(fp_real), parameter, public | zero = 0.0_FP_REAL |
| real(fp_real), parameter, public | half = 0.5_FP_REAL |
| real(fp_real), parameter, public | onep5 = 1.5_FP_REAL |
| real(fp_real), parameter, public | third = one/3.0_FP_REAL |
| real(fp_real), parameter, public | fourth = 0.25_FP_REAL |
| real(fp_real), parameter, public | two = 2.0_FP_REAL |
| real(fp_real), parameter, public | three = 3.0_FP_REAL |
| real(fp_real), parameter, public | four = 4.0_FP_REAL |
| real(fp_real), parameter, public | five = 5.0_FP_REAL |
| real(fp_real), parameter, public | six = 6.0_FP_REAL |
| real(fp_real), parameter, public | ten = 10.0_FP_REAL |
| real(fp_real), parameter, public | pi = atan2(zero, -one) |
| real(fp_real), parameter, public | pi2 = 2*pi |
| real(fp_real), parameter, public | pi4 = 4*pi |
| real(fp_real), parameter, public | pio2 = half*pi |
| real(fp_real), parameter, public | pio4 = fourth*pi |
| real(fp_real), parameter, public | pio8 = 0.125_FP_REAL*pi |
| real(fp_real), parameter, public | deg2rad = pi/180.0_FP_REAL |
| real(fp_real), parameter, public | smallnum03 = 1.0e-03_FP_REAL |
| real(fp_real), parameter, public | smallnum06 = 1.0e-06_FP_REAL |
| real(fp_real), parameter, public | smallnum08 = 1.0e-08_FP_REAL |
| real(fp_real), parameter, public | smallnum10 = 1.0e-10_FP_REAL |
Function/Subroutine Documentation
◆ bispev()
| pure subroutine, public fitpack_core::bispev | ( | real(fp_real), dimension(nx), intent(in) | tx, |
| integer(fp_size), intent(in) | nx, | ||
| real(fp_real), dimension(ny), intent(in) | ty, | ||
| integer(fp_size), intent(in) | ny, | ||
| real(fp_real), dimension((nx-kx-1)*(ny-ky-1)), intent(in) | c, | ||
| integer(fp_size), intent(in) | kx, | ||
| integer(fp_size), intent(in) | ky, | ||
| real(fp_real), dimension(mx), intent(in) | x, | ||
| integer(fp_size), intent(in) | mx, | ||
| real(fp_real), dimension(my), intent(in) | y, | ||
| integer(fp_size), intent(in) | my, | ||
| real(fp_real), dimension(mx*my), intent(out) | z, | ||
| real(fp_real), dimension(lwrk), intent(inout) | wrk, | ||
| integer(fp_size), intent(in) | lwrk, | ||
| integer(fp_size), dimension(kwrk), intent(inout) | iwrk, | ||
| integer(fp_size), intent(in) | kwrk, | ||
| integer(fp_flag), intent(out) | ier ) |
Evaluate a bivariate spline on a rectangular grid.
Given a bivariate spline \( s(x,y) \) of degrees \( k_x \) and \( k_y \) in tensor-product B-spline representation, evaluates \( s(x_i, y_j) \) on the grid \( i = 1,\ldots,m_x;\ j = 1,\ldots,m_y \).

◆ clocur()
| pure subroutine, public fitpack_core::clocur | ( | integer(fp_size), intent(in) | iopt, |
| integer(fp_size), intent(in) | ipar, | ||
| integer(fp_size), intent(in) | idim, | ||
| integer(fp_size), intent(in) | m, | ||
| real(fp_real), dimension(m), intent(inout) | u, | ||
| integer(fp_size), intent(in) | mx, | ||
| real(fp_real), dimension(mx), intent(in) | x, | ||
| real(fp_real), dimension(m), intent(in) | w, | ||
| integer(fp_size), intent(in) | k, | ||
| real(fp_real), intent(in) | s, | ||
| integer(fp_size), intent(in) | nest, | ||
| integer(fp_size), intent(inout) | n, | ||
| real(fp_real), dimension(nest), intent(inout) | t, | ||
| integer(fp_size), intent(in) | nc, | ||
| real(fp_real), dimension(nc), intent(inout) | c, | ||
| real(fp_real), intent(inout) | fp, | ||
| real(fp_real), dimension(lwrk), intent(inout) | wrk, | ||
| integer(fp_size), intent(in) | lwrk, | ||
| integer(fp_size), dimension(nest), intent(inout) | iwrk, | ||
| integer(fp_flag), intent(inout) | ier ) |
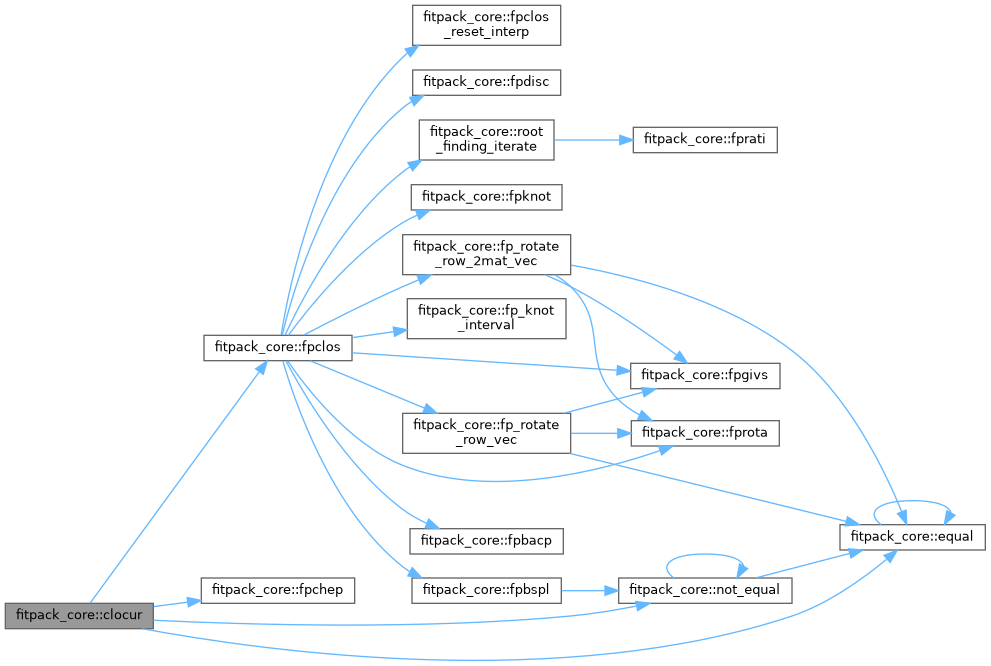
Determine a smooth closed parametric spline curve approximation.
Given \( m \) data points \( \mathbf{x}_i \in \mathbb{R}^{\text{idim}} \) with \( \mathbf{x}_1 = \mathbf{x}_m \) (closure condition) and weights \( w_i > 0 \), computes an idim-dimensional periodic spline curve \( \mathbf{s}(u) = (s_1(u),\ldots,s_{\text{idim}}(u)) \) of degree \( k \).
Parameter values \( u_i \) can be supplied by the user (ipar=1) or computed automatically from cumulative chord lengths (ipar=0).
- Parameters
-
[in] iopt Computation mode: -1(LSQ),0(new smoothing),1(continue).[in] ipar Parameter mode: 0= automatic (chord-length),1= user-supplied.[in] idim Dimension of the curve, \( 1 \le \text{idim} \le 10 \). [in] m Number of data points, \( m > 1 \). [in,out] u Parameter values (length \( m \)). Output when ipar=0.[in] mx Declared dimension of x, \( \text{mx} \ge \text{idim} \times m \).[in] x Data coordinates: x(idim*(i-1)+j)is the \( j \)-th coordinate of point \( i \). First and last points must coincide.[in] w Weights (length \( m \)). \( w_m \) not used. [in] k Spline degree, \( 1 \le k \le 5 \). Cubic recommended. [in] s Smoothing factor \( S \ge 0 \). [in] nest Over-estimate of total knots. nest=m+2*kalways suffices.[in,out] n Total number of knots. [in,out] t Knot positions (length nest).[in] nc Declared dimension of c, \( \text{nc} \ge \text{nest} \times \text{idim} \).[in,out] c B-spline coefficients (length nc).[in,out] fp Weighted sum of squared residuals. [in,out] wrk Real workspace, length \( \ge m(k+1) + \text{nest}(7+\text{idim}+5k) \). [in] lwrk Declared dimension of wrk.[in,out] iwrk Integer workspace (length nest).[in,out] ier Error flag (same codes as curfit).
- See also
- Dierckx, Ch. 6, §6.1–6.2; fpclos — core closed-curve fitting algorithm
◆ cocosp()
| pure subroutine, public fitpack_core::cocosp | ( | integer(fp_size), intent(in) | m, |
| real(fp_real), dimension(m), intent(in) | x, | ||
| real(fp_real), dimension(m), intent(in) | y, | ||
| real(fp_real), dimension(m), intent(in) | w, | ||
| integer(fp_size), intent(in) | n, | ||
| real(fp_real), dimension(n), intent(in) | t, | ||
| real(fp_real), dimension(n), intent(inout) | e, | ||
| integer(fp_size), intent(in) | maxtr, | ||
| integer(fp_size), intent(in) | maxbin, | ||
| real(fp_real), dimension(n), intent(out) | c, | ||
| real(fp_real), intent(out) | sq, | ||
| real(fp_real), dimension(m), intent(out) | sx, | ||
| logical(fp_bool), dimension(n), intent(out) | bind, | ||
| real(fp_real), dimension(lwrk), intent(inout) | wrk, | ||
| integer(fp_size), intent(in) | lwrk, | ||
| integer(fp_size), dimension(kwrk), intent(inout) | iwrk, | ||
| integer(fp_size), intent(in) | kwrk, | ||
| integer(fp_flag), intent(out) | ier ) |
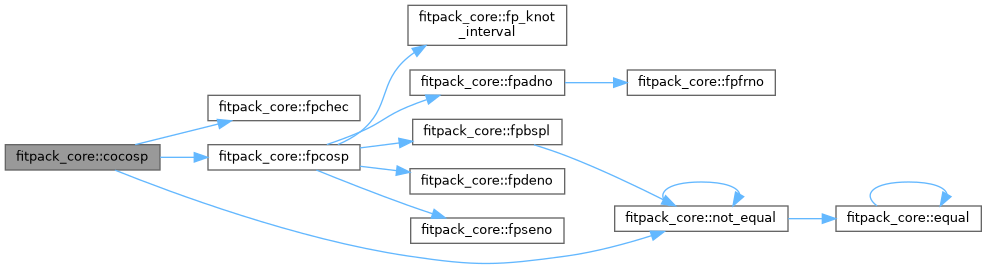
Fit a cubic spline with convexity/concavity constraints and user-specified knots.
Given data points \( (x_i, y_i) \) with weights \( w_i > 0 \) and a fixed set of knots \( t_j \), computes the weighted least-squares cubic spline \( s(x) \) subject to local convexity/concavity constraints specified by the array e:
- \( e_j = +1 \): \( s''(t_{j+3}) \ge 0 \) (locally concave)
- \( e_j = -1 \): \( s''(t_{j+3}) \le 0 \) (locally convex)
- \( e_j = 0 \): no constraint at \( t_{j+3} \)
The constrained fitting uses a quadratic programming approach with a binary tree structure for managing active constraints.
- Parameters
-
[in] m Number of data points, \( m > 3 \). [in] x Abscissae (strictly ascending). [in] y Ordinates. [in] w Weights, \( w_i > 0 \). [in] n Total number of knots, \( 8 \le n \le m + 4 \). [in] t Knot positions (length \( n \)), user-specified. [in,out] e Convexity indicators (length \( n \)). Only e(1:n-6)used.[in] maxtr Over-estimate of tree records. maxtr=100usually sufficient.[in] maxbin Over-estimate of inflection knots. maxbin=10usually sufficient.[out] c B-spline coefficients (length \( n \)). [out] sq Weighted sum of squared residuals. [out] sx Spline values at data points (length \( m \)). [out] bind Active constraint flags (length \( n \)): .true.where \( s''=0 \).[in,out] wrk Real workspace, length \( \ge 4m + 7n + \text{maxbin}(\text{maxbin}+n+1) \). [in] lwrk Declared dimension of wrk.[in,out] iwrk Integer workspace, length \( \ge 4 \times \text{maxtr} + 2(\text{maxbin}+1) \). [in] kwrk Declared dimension of iwrk.[out] ier Error flag: 0= success;1= maxbin exceeded;2= maxtr exceeded;3= QP solver failed;10= invalid input.
- See also
- Dierckx, Ch. 7, §7.1–7.2; fpcosp — core convexity-constrained algorithm
◆ concon()
| pure subroutine, public fitpack_core::concon | ( | integer(fp_size), intent(in) | iopt, |
| integer(fp_size), intent(in) | m, | ||
| real(fp_real), dimension(m), intent(in) | x, | ||
| real(fp_real), dimension(m), intent(in) | y, | ||
| real(fp_real), dimension(m), intent(in) | w, | ||
| real(fp_real), dimension(m), intent(inout) | v, | ||
| real(fp_real), intent(in) | s, | ||
| integer(fp_size), intent(in) | nest, | ||
| integer(fp_size), intent(in) | maxtr, | ||
| integer(fp_size), intent(in) | maxbin, | ||
| integer(fp_size), intent(inout) | n, | ||
| real(fp_real), dimension(nest), intent(inout) | t, | ||
| real(fp_real), dimension(nest), intent(inout) | c, | ||
| real(fp_real), intent(out) | sq, | ||
| real(fp_real), dimension(m), intent(inout) | sx, | ||
| logical(fp_bool), dimension(nest), intent(inout) | bind, | ||
| real(fp_real), dimension(lwrk), intent(inout) | wrk, | ||
| integer(fp_size), intent(in) | lwrk, | ||
| integer(fp_size), dimension(kwrk), intent(inout) | iwrk, | ||
| integer(fp_size), intent(in) | kwrk, | ||
| integer(fp_flag), intent(out) | ier ) |
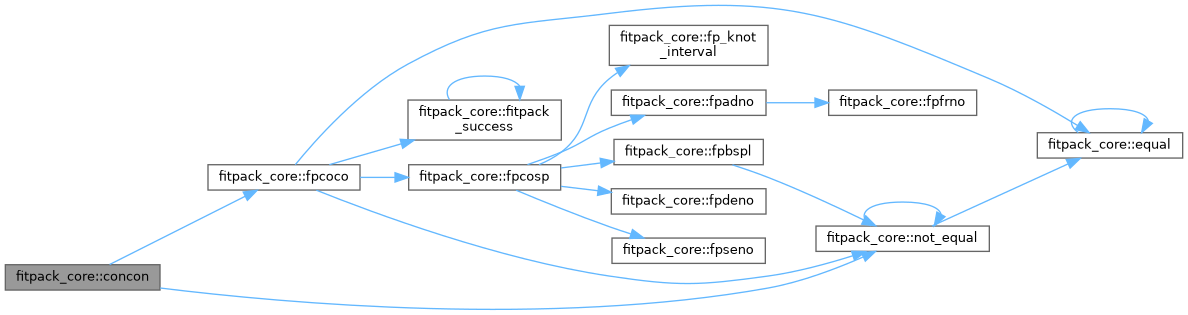
Fit a cubic spline with convexity/concavity constraints and automatic knot placement.
Given data points \( (x_i, y_i) \) with weights \( w_i > 0 \) and local convexity/concavity requirements \( v_i \in \{-1, 0, +1\} \) at the data points, determines a cubic spline \( s(x) \) satisfying the constraints with weighted residual sum \( \text{sq} \le S \).
Unlike cocosp (which takes fixed knots), concon automatically selects the number and position of knots, starting from a minimal set and adding knots progressively.
- Parameters
-
[in] iopt Computation mode: 0= start with minimal knots;1= continue.[in] m Number of data points, \( m > 3 \). [in] x Abscissae (strictly ascending). [in] y Ordinates. [in] w Weights, \( w_i > 0 \). [in,out] v Convexity indicators at data points: +1(concave),-1(convex),0(free).[in] s Smoothing factor \( S \ge 0 \) (target upper bound for sq). [in] nest Over-estimate of total knots, \( \ge 8 \). nest=m+4always suffices.[in] maxtr Over-estimate of tree records. maxtr=100usually sufficient.[in] maxbin Over-estimate of inflection knots. maxbin=10usually sufficient.[in,out] n Total number of knots. [in,out] t Knot positions (length nest).[in,out] c B-spline coefficients (length nest).[out] sq Weighted sum of squared residuals. [in,out] sx Spline values at data points (length \( m \)). [in,out] bind Active constraint flags (length nest).[in,out] wrk Real workspace, length \( \ge 4m + 8\,\text{nest} + \text{maxbin}(\text{maxbin}+\text{nest}+1) \). [in] lwrk Declared dimension of wrk.[in,out] iwrk Integer workspace, length \( \ge 4\,\text{maxtr} + 2(\text{maxbin}+1) \). [in] kwrk Declared dimension of iwrk.[out] ier Error flag: 0: normal return ( \( \text{sq} \le S \) and constraints satisfied).-3: nest too small.-2: max knots \( m+4 \) reached.-1: adding knots won't help.1–5: various errors (maxbin, maxtr, QP, nest, constraint conflicts).10: invalid input.
◆ concur()
| pure subroutine, public fitpack_core::concur | ( | integer(fp_size), intent(in) | iopt, |
| integer(fp_size), intent(in) | idim, | ||
| integer(fp_size), intent(in) | m, | ||
| real(fp_real), dimension(m), intent(in) | u, | ||
| integer(fp_size), intent(in) | mx, | ||
| real(fp_real), dimension(mx), intent(in) | x, | ||
| real(fp_real), dimension(mx), intent(inout) | xx, | ||
| real(fp_real), dimension(m), intent(in) | w, | ||
| integer(fp_size), intent(in) | ib, | ||
| real(fp_real), dimension(nb), intent(in) | db, | ||
| integer(fp_size), intent(in) | nb, | ||
| integer(fp_size), intent(in) | ie, | ||
| real(fp_real), dimension(ne), intent(in) | de, | ||
| integer(fp_size), intent(in) | ne, | ||
| integer(fp_size), intent(in) | k, | ||
| real(fp_real), intent(in) | s, | ||
| integer(fp_size), intent(in) | nest, | ||
| integer(fp_size), intent(inout) | n, | ||
| real(fp_real), dimension(nest), intent(inout) | t, | ||
| integer(fp_size), intent(in) | nc, | ||
| real(fp_real), dimension(nc), intent(inout) | c, | ||
| integer(fp_size), intent(in) | np, | ||
| real(fp_real), dimension(np), intent(inout) | cp, | ||
| real(fp_real), intent(inout) | fp, | ||
| real(fp_real), dimension(lwrk), intent(inout) | wrk, | ||
| integer(fp_size), intent(in) | lwrk, | ||
| integer(fp_size), dimension(nest), intent(inout) | iwrk, | ||
| integer(fp_flag), intent(out) | ier ) |
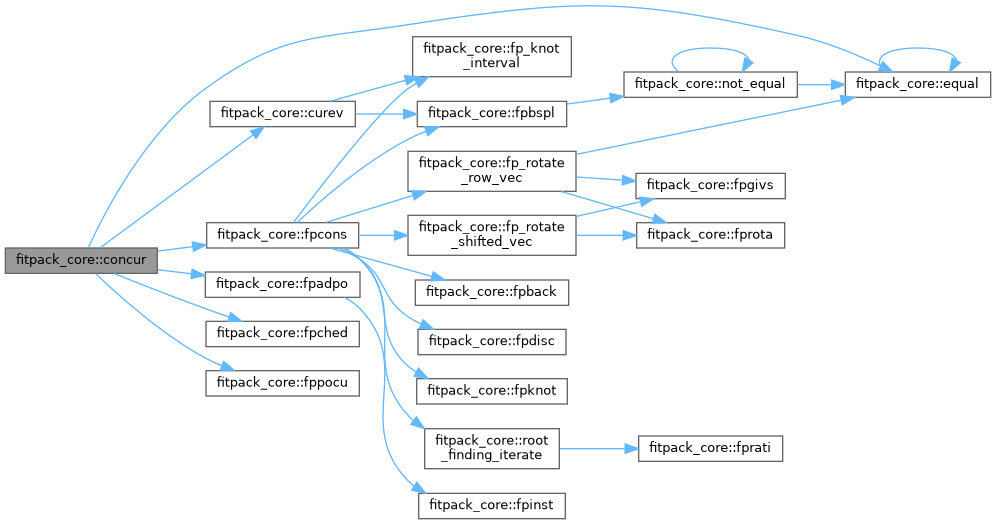
Determine a smooth parametric spline curve with derivative constraints at endpoints.
Given \( m \) ordered points \( \mathbf{x}_i \in \mathbb{R}^{\text{idim}} \) with parameter values \( u_i \) and weights \( w_i > 0 \), computes a parametric spline curve \( \mathbf{s}(u) \) of degree \( k \) that satisfies derivative constraints at the endpoints:
\[ s_j^{(l)}(u_1) = d_b(\text{idim} \cdot l + j), \quad l = 0,\ldots,i_b{-}1 \]
\[ s_j^{(l)}(u_m) = d_e(\text{idim} \cdot l + j), \quad l = 0,\ldots,i_e{-}1 \]
- Parameters
-
[in] iopt Computation mode: -1(LSQ),0(new smoothing),1(continue).[in] idim Dimension of the curve, \( 1 \le \text{idim} \le 10 \). [in] m Number of data points. [in] u Parameter values (strictly ascending). [in] mx Declared dimension of xandxx.[in] x Data coordinates (length mx).[in,out] xx Workspace (length mx). Modified data for constrained fitting.[in] w Weights (length \( m \)), strictly positive. [in] ib Number of derivative constraints at \( u_1 \), \( 0 \le i_b \le (k+1)/2 \). [in] db Begin-point derivatives (length nb).[in] nb Dimension of db, \( \ge \max(1, \text{idim} \times i_b) \).[in] ie Number of derivative constraints at \( u_m \), \( 0 \le i_e \le (k+1)/2 \). [in] de End-point derivatives (length ne).[in] ne Dimension of de, \( \ge \max(1, \text{idim} \times i_e) \).[in] k Spline degree: 1, 3, or 5. [in] s Smoothing factor \( S \ge 0 \). [in] nest Over-estimate of total knots. [in,out] n Total number of knots. [in,out] t Knot positions (length nest).[in] nc Declared dimension of c.[in,out] c B-spline coefficients (length nc).[in] np Declared dimension of cp, \( \ge 2(k+1) \times \text{idim} \).[in,out] cp Constraint polynomial coefficients (length np).[in,out] fp Weighted sum of squared residuals. [in,out] wrk Real workspace. [in] lwrk Declared dimension of wrk.[in,out] iwrk Integer workspace (length nest).[out] ier Error flag (same codes as curfit).
- See also
- Dierckx, Ch. 8, §8.2; fpcons — core constrained fitting algorithm
◆ cualde()
| pure subroutine, public fitpack_core::cualde | ( | integer(fp_size), intent(in) | idim, |
| real(fp_real), dimension(n), intent(in) | t, | ||
| integer(fp_size), intent(in) | n, | ||
| real(fp_real), dimension(nc), intent(in) | c, | ||
| integer(fp_size), intent(in) | nc, | ||
| integer(fp_size), intent(in) | k1, | ||
| real(fp_real), intent(in) | u, | ||
| real(fp_real), dimension(nd), intent(out) | d, | ||
| integer(fp_size), intent(in) | nd, | ||
| integer(fp_flag), intent(out) | ier ) |
Evaluate all derivatives of a parametric spline curve at a single point.
Given an idim-dimensional spline curve \( \mathbf{s}(u) = (s_1(u),\ldots,s_{\text{idim}}(u)) \) of order \( k_1 = k + 1 \) with common knots, evaluates all derivatives up to order \( k \) at the point \( u \). Uses the stable recurrence scheme of de Boor for each coordinate component.
- Parameters
-
[in] idim Dimension of the curve. [in] t Knot positions (length \( n \)), common to all components. [in] n Total number of knots. [in] c B-spline coefficients (length nc), stored as \( n \) coefficients for each of theidimcomponents consecutively.[in] nc Total number of coefficients ( \( \ge n \times \text{idim} \)). [in] k1 Order of the spline ( \( k_1 = k + 1 \)). [in] u Parameter value where derivatives are evaluated. Must satisfy \( t_{k_1} \le u \le t_{n-k_1+1} \). [out] d Derivative values (length nd):d(idim*l+j)contains the \( j \)-th coordinate of the \( l \)-th derivative.[in] nd Dimension of d. Must satisfy \( \text{nd} \ge k_1 \times \text{idim} \).[out] ier Error flag: 0= normal return;10= invalid input.
- Note
- At a knot, right derivatives are computed (left derivatives at the right boundary).
◆ curev()
| pure subroutine, public fitpack_core::curev | ( | integer(fp_size), intent(in) | idim, |
| real(fp_real), dimension(n), intent(in) | t, | ||
| integer(fp_size), intent(in) | n, | ||
| real(fp_real), dimension(nc), intent(in) | c, | ||
| integer(fp_size), intent(in) | nc, | ||
| integer(fp_size), intent(in) | k, | ||
| real(fp_real), dimension(m), intent(in) | u, | ||
| integer(fp_size), intent(in) | m, | ||
| real(fp_real), dimension(idim,m), intent(out) | x, | ||
| integer(fp_size), intent(in) | mx, | ||
| integer(fp_flag), intent(out) | ier ) |
Evaluate a parametric spline curve at a set of parameter values.
Given an idim-dimensional spline curve \( \mathbf{s}(u) = (s_1(u),\ldots,s_{\text{idim}}(u)) \) of degree \( k \) in B-spline representation with common knots, evaluates \( \mathbf{s}(u_i) \) for \( i = 1,\ldots,m \).
- Parameters
-
[in] idim Dimension of the curve ( \( 1 \le \text{idim} \le 10 \)). [in] t Knot positions (length \( n \)). [in] n Total number of knots. [in] c B-spline coefficients (length nc), stored consecutively for each dimension.[in] nc Total number of coefficients. [in] k Degree of the spline. [in] u Parameter values (length \( m \)), must be non-decreasing and within \( [t_{k+1}, t_{n-k}] \). [in] m Number of evaluation points, \( m \ge 1 \). [out] x Curve values (length mx):x(idim*(i-1)+j)is the \( j \)-th coordinate at the \( i \)-th point.[in] mx Dimension of x. Must satisfy \( \text{mx} \ge m \times \text{idim} \).[out] ier Error flag: 0= normal return;10= invalid input.
- See also
- Dierckx, Ch. 6, §6.3; fpbspl — B-spline basis evaluation

◆ curfit()
| pure subroutine, public fitpack_core::curfit | ( | integer(fp_size), intent(in) | iopt, |
| integer(fp_size), intent(in) | m, | ||
| real(fp_real), dimension(m), intent(in) | x, | ||
| real(fp_real), dimension(m), intent(in) | y, | ||
| real(fp_real), dimension(m), intent(in) | w, | ||
| real(fp_real), intent(in) | xb, | ||
| real(fp_real), intent(in) | xe, | ||
| integer(fp_size), intent(in) | k, | ||
| real(fp_real), intent(in) | s, | ||
| integer(fp_size), intent(in) | nest, | ||
| integer(fp_size), intent(inout) | n, | ||
| real(fp_real), dimension(nest), intent(inout) | t, | ||
| real(fp_real), dimension(nest), intent(inout) | c, | ||
| real(fp_real), intent(inout) | fp, | ||
| real(fp_real), dimension(lwrk), intent(inout) | wrk, | ||
| integer(fp_size), intent(in) | lwrk, | ||
| integer(fp_size), dimension(nest), intent(inout) | iwrk, | ||
| integer(fp_flag), intent(out) | ier ) |
Determine a smooth spline approximation of degree \( k \) to a set of data points.
Given data points \( (x_i, y_i) \) with positive weights \( w_i \), \( i=1,\ldots,m \), computes a spline \( s(x) \) of degree \( k \) on the interval \( [x_b, x_e] \).
- If
iopt=-1: computes the weighted least-squares spline for a given set of knots. - If
iopt>=0: the number and position of knots is chosen automatically. Smoothness is achieved by minimizing discontinuity jumps of the \( k \)-th derivative at interior knots, subject to the constraint\[ F(p) = \sum_{i=1}^{m} \bigl(w_i\,(y_i - s(x_i))\bigr)^2 \le S \]
where \( S \ge 0 \) is the smoothing factor.
The result is returned in B-spline representation with coefficients \( c_j,\ j=1,\ldots,n{-}k{-}1 \) and can be evaluated with splev.
◆ dblint()
| pure real(fp_real) function, public fitpack_core::dblint | ( | integer(fp_dim), intent(in) | dims, |
| real(fp_real), dimension(:,:), intent(in) | t, | ||
| integer(fp_size), dimension(dims), intent(in) | n, | ||
| real(fp_real), dimension(:), intent(in) | c, | ||
| integer(fp_size), dimension(dims), intent(in) | k, | ||
| real(fp_real), dimension(dims), intent(in) | xb, | ||
| real(fp_real), dimension(dims), intent(in) | xe ) |
Integral of a tensor-product spline over an axis-aligned box (any dimension).
Computes \( \int_{xb_1}^{xe_1}\!\cdots\!\int_{xb_d}^{xe_d} s(x_1,\ldots,x_d)\,dx_1\cdots dx_d \). The box integral is separable: with \( s=\sum_{\mathbf i} c_{\mathbf i}\prod_d N^{(d)}_{i_d} \) it factors into a product of 1-D B-spline integrals per axis contracted against the coefficient tensor. Each per-axis integral vector is produced by fpintb; the contraction reuses the fpndsp odometer. At dims=2 the terms and their accumulation order reduce to the classic bivariate box integral.
- Parameters
-
[in] dims Number of axes (domain dimension) [in] t Per-axis knot vectors; column \( d \) is t(1:n(d),d)[in] n Number of knots per axis, n(dims)[in] c B-spline coefficient tensor, flat row-major (first axis varies slowest) [in] k Spline degree per axis, k(dims)[in] xb Per-axis lower integration limits, xb(dims)[in] xe Per-axis upper integration limits, xe(dims)
- Returns
- res Value of the box integral
◆ equal()
| elemental logical(fp_bool) function, public fitpack_core::equal | ( | real(fp_real), intent(in) | a, |
| real(fp_real), intent(in) | b ) |
Test whether two reals are equal within machine precision.
Returns .true. if \( |a - b| < \text{spacing}(\min(|a|,|b|)) \).
◆ evapol()
| pure real(fp_real) function, public fitpack_core::evapol | ( | real(fp_real), dimension(nu), intent(in) | tu, |
| integer(fp_size), intent(in) | nu, | ||
| real(fp_real), dimension(nv), intent(in) | tv, | ||
| integer(fp_size), intent(in) | nv, | ||
| real(fp_real), dimension((nu-4)*(nv-4)), intent(in) | c, | ||
| procedure(fitpack_polar_boundary) | rad, | ||
| real(fp_real), intent(in) | x, | ||
| real(fp_real), intent(in) | y ) |
Evaluate a polar spline \( f(x,y) = s(u,v) \) at a Cartesian point.
Given a bicubic spline \( s(u,v) \) ( \( 0 \le u \le 1 \), \( -\pi \le v \le \pi \)) fitted by polar, evaluates \( f(x,y) \) via the polar transformation:
\[ x = u \cdot r(v) \cos v, \qquad y = u \cdot r(v) \sin v \]
where \( r(v) \) is the boundary function defining the polar domain.
- Parameters
-
[in] tu Knot positions in \( u \) (length \( n_u \)). [in] nu Total number of knots in \( u \). [in] tv Knot positions in \( v \) (length \( n_v \)). [in] nv Total number of knots in \( v \). [in] c B-spline coefficients, length \( (n_u{-}4)(n_v{-}4) \). [in] rad Boundary function \( r(v) \) defining the polar domain. [in] x Cartesian \( x \)-coordinate. [in] y Cartesian \( y \)-coordinate.
- Returns
- The value \( f(x,y) = s(u,v) \).

◆ fitpack_argsort()
| pure integer(fp_size) function, dimension(size(list)), public fitpack_core::fitpack_argsort | ( | real(fp_real), dimension(:), intent(in) | list | ) |
Return the permutation indices that would sort an array.
Returns an index array ilist such that list(ilist) is in ascending order.
- Parameters
-
[in] list Array of values to sort.
- Returns
- Index permutation (length
size(list)).
◆ fitpack_error_handling()
| subroutine, public fitpack_core::fitpack_error_handling | ( | integer(fp_flag), intent(in) | ierr, |
| integer(fp_flag), intent(out), optional | ierr_out, | ||
| character(*), intent(in) | whereat ) |
Dispatch an error code: return it to caller or halt with a message.
If ierr_out is present, the error code is returned through it. Otherwise, if ierr indicates failure, the program halts with a diagnostic message.
- Parameters
-
[in] ierr Error flag from a FITPACK routine. [out] ierr_out Optional output flag; if present, receives ierrinstead of halting.[in] whereAt Location string for the diagnostic message.
◆ fitpack_message()
| pure character(len=:) function, allocatable, public fitpack_core::fitpack_message | ( | integer(fp_flag), intent(in) | ierr | ) |
Convert an integer error flag to a human-readable message string.
- Parameters
-
[in] ierr FITPACK error flag (e.g., FITPACK_OK,FITPACK_INPUT_ERROR).
- Returns
- Allocatable character string describing the error.
◆ fitpack_quicksort()
|
private |
In-place quicksort with optional index tracking.
Sorts list in ascending order (or descending if down=.true.). If ilist is present, its elements are permuted in parallel to track the original positions.
- Parameters
-
[in,out] list Array to sort. [in,out] ilist Optional index array, permuted alongside list.[in] down Optional flag for descending order.
◆ fitpack_success()
| elemental logical(fp_bool) function, public fitpack_core::fitpack_success | ( | integer(fp_flag), intent(in) | ierr | ) |
Test whether a FITPACK error flag indicates success.
Returns .true. if ierr <= 0 (i.e., FITPACK_OK or any negative success variant).
- Parameters
-
[in] ierr Error flag from a FITPACK routine.
- Returns
.true.on success,.false.on error.
◆ fourco()
| pure subroutine, public fitpack_core::fourco | ( | real(fp_real), dimension(n), intent(in) | t, |
| integer(fp_size), intent(in) | n, | ||
| real(fp_real), dimension(n), intent(in) | c, | ||
| real(fp_real), dimension(m), intent(in) | alfa, | ||
| integer(fp_size), intent(in) | m, | ||
| real(fp_real), dimension(m), intent(out) | ress, | ||
| real(fp_real), dimension(m), intent(out) | resc, | ||
| real(fp_real), dimension(n), intent(inout) | wrk1, | ||
| real(fp_real), dimension(n), intent(inout) | wrk2, | ||
| integer(fp_flag), intent(out) | ier ) |
Compute Fourier coefficients of a cubic spline.
For a cubic spline \( s(x) \) and a set of parameters \( \alpha_i \), \( i = 1,\ldots,m \), computes the Fourier integrals:
\[ R_s(i) = \int s(x) \sin(\alpha_i x)\,dx, \qquad R_c(i) = \int s(x) \cos(\alpha_i x)\,dx \]
over the support of the spline.
- Parameters
-
[in] t Knot positions (length \( n \)). Must have \( n \ge 10 \). [in] n Total number of knots. [in] c B-spline coefficients (length \( n \)). [in] alfa Fourier parameters \( \alpha_i \) (length \( m \)). [in] m Number of integrals to compute. [out] ress Sine integrals \( R_s(i) \) (length \( m \)). [out] resc Cosine integrals \( R_c(i) \) (length \( m \)). [in,out] wrk1 Real workspace (length \( n \)). [in,out] wrk2 Real workspace (length \( n \)). [out] ier Error flag: 0= normal return;10= invalid input.

◆ fp_bool_comm_expand_1d()
|
private |
Expand communication buffer into 1D logical(FP_BOOL) allocatable array.
◆ fp_bool_comm_pack_1d()
|
private |
Pack 1D logical(FP_BOOL) allocatable array into communication buffer.
◆ fp_bool_comm_size_1d()
|
private |
Calculate storage size for 1D logical(FP_BOOL) allocatable array.
◆ fp_grid_index()
|
private |
Flat 0-based offset of a multi-index into a row-major tensor.
Given a 1-based multi-index idx(1:d) and the strides from fp_grid_strides, returns the 0-based linear offset sum((idx-1)*strides). Add 1 for Fortran 1-based access, e.g. c(fp_grid_index(idx,str)+1). Integer arithmetic is exact, so routing tensor addresses through this helper is bit-for-bit identical to the hand-written 2-D index expressions.
- Parameters
-
[in] d Number of axes (length of idx and strides). [in] idx 1-based multi-index (length d). [in] strides Row-major strides (length d), from fp_grid_strides.
- Returns
- offset 0-based flat offset.
◆ fp_grid_strides()
|
private |
Row-major strides for a flat tensor of the given per-axis sizes.
Returns the multipliers str(d) such that a 1-based multi-index idx(1:d) maps to the flat 0-based offset sum((idx-1)*str). The first axis varies slowest (leading stride = product of the trailing sizes), matching the storage of the gridded data tensor z (sizes [mx,my] -> strides [my,1]) and the coefficient tensor c (sizes [nk1x,nk1y] -> strides [nk1y,1]) used by the 2-D gridded core. Each tensor must be passed its own size vector; the two differ only in the leading stride.
- Parameters
-
[in] d Number of axes. [in] sizes Per-axis extents, sizes(d).
- Returns
- str Row-major strides;
str(d) = 1.
◆ fp_grid_unravel()
|
private |
Multi-index of a flat 0-based offset into a row-major tensor (inverse of fp_grid_index).
Given a 0-based linear offset and the per-axis extents sizes(1:d), returns the 1-based multi-index idx(1:d) such that fp_grid_index(d, idx, fp_grid_strides(d, sizes)) == offset. Row-major: the last axis varies fastest (stride 1), the first axis slowest. Used to drive a dimension-generic loop over a tensor's grid points with a single linear counter. Integer arithmetic is exact, so it is bit-for-bit consistent with the hand-written 2-D index walks.
- Parameters
-
[in] d Number of axes (length of sizes and idx). [in] offset 0-based flat offset (0 <= offset < product(sizes)). [in] sizes Per-axis extents, sizes(d).
- Returns
- idx 1-based multi-index, idx(d).
◆ fp_knot_interval()
|
private |
Find knot interval index l such that t(l) <= x < t(l+1). Uses hybrid search: linear for small ranges, binary for large. This replaces the repeated pattern: do while (x >= t(l+1) .and. l /= l_max) l = l + 1 end do.
Find the knot interval containing a given value.
Returns the index \( l \) such that \( t_l \le x < t_{l+1} \), using linear search for small ranges (or warm starts) and binary search otherwise.
- Parameters
-
[in] t Knot array (non-decreasing). [in] x Value to locate. [in] l_start Left bound for the search. [in] l_max Right bound for the search.
- Returns
- Index of the interval containing
x.
◆ fp_rcomms_per_bits()
| elemental integer(fp_size) function, public fitpack_core::fp_rcomms_per_bits | ( | integer(fp_size), intent(in) | nbits | ) |
Number of FP_COMM elements required to store nbits of data.
◆ fp_real_comm_expand_1d()
|
private |
Expand communication buffer into 1D real(FP_REAL) allocatable array.
◆ fp_real_comm_expand_2d()
|
private |
Expand communication buffer into 2D real(FP_REAL) allocatable array.
◆ fp_real_comm_expand_3d()
|
private |
Expand communication buffer into 3D real(FP_REAL) allocatable array.
◆ fp_real_comm_pack_1d()
|
private |
Pack 1D real(FP_REAL) allocatable array into communication buffer.
◆ fp_real_comm_pack_2d()
|
private |
Pack 2D real(FP_REAL) allocatable array into communication buffer.
◆ fp_real_comm_pack_3d()
|
private |
Pack 3D real(FP_REAL) allocatable array into communication buffer.
◆ fp_real_comm_size_1d()
|
private |
Calculate storage size for 1D real(FP_REAL) allocatable array Header: 1 FP_COMM storing bounds as 2 int32 (or NOT_ALLOC marker) Data: raw transfer of array contents.
◆ fp_real_comm_size_2d()
|
private |
Calculate storage size for 2D real(FP_REAL) allocatable array.
◆ fp_real_comm_size_3d()
|
private |
Calculate storage size for 3D real(FP_REAL) allocatable array.
◆ fp_rotate_2mat_stride()
|
private |
Rotate a split row into the block-triangular periodic system with stride RHS.
Combines the two-matrix periodic decomposition (Eq. 6.13) with the stride (row-access) RHS pattern needed for grid-based surface fitting. Rotates the split row \( [h_1 \mid h_2] \) into \( [R_{11}^* \mid R_{12}^* 0 \mid R_{22}^*] \)
◆ fp_rotate_row()
|
private |
Rotate an observation row into the upper triangular band matrix.
Incorporates a new observation row \( h \) (containing the \( k+1 \) non-zero B-spline values) into the upper triangular band matrix \( R \) using a sequence of Givens plane rotations (Eq. 4.15). Each rotation eliminates one element of \( h \) while updating the corresponding diagonal and upper elements of \( R \), plus the scalar right-hand side:
\[ \begin{pmatrix} c & s \\ -s & c \end{pmatrix} \begin{pmatrix} r_{j,j} \\ h_i \end{pmatrix} = \begin{pmatrix} r'_{j,j} \\ 0 \end{pmatrix} \tag{4.15} \]
This is the standard-walk variant: \( h(i) \) pivots for \( i = 1, \ldots, \texttt{band} \), targeting rows \( j = \texttt{j\_start}+1, \ldots, \texttt{j\_start}+\texttt{band} \) of \( R \). Zero pivots are skipped.
- Parameters
-
[in,out] h Row to rotate, length band. Modified in place.[in] band Number of elements in the row (typically \( k+1 \)) [in,out] a Upper triangular band matrix \( R \). a(j,1)is the diagonal;a(j,2:)stores the upper bandwidth.[in,out] yi Scalar RHS contribution; updated by each rotation [in,out] z RHS vector; positions j_start+1 : j_start+bandupdated[in] j_start Starting row index minus one (loop begins at j_start+1)
- See also
- Dierckx, Ch. 4, §4.1.2 (pp. 55-58), Eq. 4.15
- fp_rotate_row_vec — vector-RHS variant for parametric fitting
◆ fp_rotate_row_2mat()
|
private |
Rotate a split observation row into the block-triangular periodic system with scalar RHS.
Scalar-RHS variant of fp_rotate_row_2mat_vec. Identical two-phase algorithm for the periodic block-triangular system (Eq. 6.13) but with a scalar right-hand side \( y_i / z(j) \) instead of the vector \( \xi(d) / z(j, 1{:}d) \).
- Parameters
-
[in,out] h1 First block of the observation row, length band1. Shifted left during Phase 1.[in] band1 Length of h1[in,out] h2 Second block (wraparound columns), length band2[in] band2 Length of h2[in,out] a1 Band matrix \( R_{11}^* \), dimension (nest,*)[in,out] a2 Band matrix \( R_{12}^* / R_{22}^* \), dimension (nest,*)[in] nest Leading dimension of a1anda2[in,out] yi Scalar RHS contribution; updated by rotations [in,out] z RHS vector; entries at rows j1_start : j1_end+band2updated[in] j1_start First row index for Phase 1 [in] j1_end Last row index for Phase 1
- See also
- Dierckx, Ch. 6, §6.1.1 (pp. 95-100), Eq. 6.10, 6.13
- fp_rotate_row_2mat_vec — vector-RHS variant
◆ fp_rotate_row_2mat_vec()
|
private |
Rotate a split observation row into the block-triangular periodic system with vector RHS.
Two-matrix Givens rotation for periodic spline fitting. The periodic B-spline constraint wraps the last \( k \) columns of the observation matrix into the first \( k \), producing a block-triangular structure:
\[ \begin{pmatrix} R_{11}^* & R_{12}^* \\ 0 & R_{22}^* \end{pmatrix} \tag{6.13} \]
Each observation row is split as \( [h_1 \mid h_2] \) and rotated in two phases:
- Phase 1: Rotate \( h_1 \) through \( R_{11}^* \) using shifted pivots (always \( h_1(1) \)), simultaneously applying cross-rotations to \( h_2 \) and \( R_{12}^* \).
- Phase 2: Rotate remaining \( h_2 \) through \( R_{22}^* \) using standard walk (diagonal at \( R_{22}^*(j,j) \)).
- Parameters
-
[in,out] h1 First block of the observation row, length band1. Shifted left during Phase 1.[in] band1 Length of h1(main bandwidth)[in,out] h2 Second block (wraparound columns), length band2[in] band2 Length of h2(typically \( k \))[in,out] a1 Band matrix \( R_{11}^* \), dimension (nest,*)[in,out] a2 Band matrix \( R_{12}^* / R_{22}^* \), dimension (nest,*)[in] nest Leading dimension of a1anda2[in,out] xi Vector RHS contribution of length idim[in,out] z RHS array (n, idim), one column per coordinate dimension[in] j1_start First row index for Phase 1 [in] j1_end Last row index for Phase 1 [in] n Leading dimension of z[in] idim Number of coordinate dimensions
- See also
- Dierckx, Ch. 6, §6.1.1 (pp. 95-100), Eq. 6.10, 6.13, Fig. 6.1
- fp_rotate_row_2mat — scalar-RHS variant
◆ fp_rotate_row_block()
|
private |
Rotate a row into a band matrix with contiguous-block RHS.
Standard-walk Givens rotation for grid-based surface fitting. Rotates row \( h \) into the upper triangular band matrix \( A \), applying the same rotations to a block right-hand side: the vector right(1:nrhs) and the column q(1:nrhs, irot) of a 2D RHS matrix.
This arises from the Kronecker product decomposition of the bivariate system (Eq. 10.4-10.8), where the one-dimensional triangularizations \( A_x \) and \( A_{uu} \) operate on contiguous blocks of the tensor-product RHS.
- Parameters
-
[in,out] h Row to rotate, length band. Modified in place.[in] band Bandwidth [in,out] a Upper triangular band matrix, dimension (na,*)[in] na Leading dimension of a[in,out] right Block RHS vector of length nrhs; updated by rotations[in,out] q 2D RHS matrix (nrhs,*); columnirotupdated[in] nrhs Number of RHS entries per rotation [in] irot_start Starting row index minus one
- See also
- Dierckx, Ch. 10, §10.2 (pp. 170-172), Eq. 10.4-10.8
- fp_rotate_row_stride — stride (row-access) RHS variant
◆ fp_rotate_row_stride()
|
private |
Rotate a row into a band matrix with stride (row-access) RHS.
Standard-walk Givens rotation for grid-based surface fitting. Rotates row \( h \) into the upper triangular band matrix \( A \), applying the same rotations to the vector right(1:nrhs) and the row c(irot, 1:nrhs) of a 2D RHS matrix c(ldc,*).
Unlike fp_rotate_row_block (which accesses RHS by columns), this routine accesses RHS by rows — the stride pattern needed for the \( A_y \) and \( A_{vv} \) triangularizations and the tensor-product back-substitution (Eq. 10.8) in the Kronecker product decomposition.
- Parameters
-
[in,out] h Row to rotate, length band. Modified in place.[in] band Bandwidth [in,out] a Upper triangular band matrix, dimension (na,*)[in] na Leading dimension of a[in,out] right Block RHS vector of length nrhs; updated by rotations[in,out] c 2D RHS matrix (ldc,*); rowirotupdated[in] ldc Leading dimension of c[in] nrhs Number of RHS entries per rotation [in] irot_start Starting row index minus one
- See also
- Dierckx, Ch. 10, §10.2 (pp. 170-172), Eq. 10.4-10.8
- fp_rotate_row_block — contiguous-block (column-access) RHS variant
◆ fp_rotate_row_vec()
|
private |
Rotate an observation row into a band matrix with vector RHS.
Vector-RHS variant of fp_rotate_row for parametric curve fitting. Rotates a new observation row \( h \) into the upper triangular band matrix \( R \) using Givens rotations (Eq. 4.15), simultaneously transforming \( d \) right-hand side vectors stored column-wise in \( z(n, d) \).
In parametric fitting, all \( d \) coordinate curves share the same knot vector and B-spline basis, so a single triangularization of \( R \) applies the same rotations to each RHS column.
- Parameters
-
[in,out] h Row to rotate, length band. Modified in place.[in] band Bandwidth (typically \( k+1 \)) [in,out] a Upper triangular band matrix \( R \), dimension (nest,*)[in] nest Leading dimension of a[in,out] xi Vector RHS contribution of length idim; updated by rotations[in,out] z RHS array (n, idim), one column per coordinate dimension[in] j_start Starting row index minus one [in] n Leading dimension of z(number of coefficients)[in] idim Number of coordinate dimensions
- See also
- Dierckx, Ch. 4, §4.1.2 (pp. 55-58), Eq. 4.15
- fp_rotate_row — scalar-RHS variant
◆ fp_rotate_shifted()
|
private |
Rotate a smoothing-matrix row into a band matrix using shifted pivots.
Shifted-pivot variant of the Givens rotation for incorporating rows of the smoothing matrix \( P \) into the triangularized observation matrix. Unlike fp_rotate_row (which walks \( h(i) \) for \( i = 1, \ldots, b \)), this routine always pivots on \( h(1) \) and shifts \( h \) left after each rotation step:
\[ h \leftarrow (h_2, h_3, \ldots, h_b, 0) \]
The effective bandwidth shrinks as \( j \to \texttt{j\_end} \). This pattern arises because the smoothing matrix \( P \) (Eq. 5.5) has bandwidth \( k+2 \) and its rows are offset relative to \( R \).
- Parameters
-
[in,out] h Row to rotate, length band. Shifted left at each step.[in] band Bandwidth (typically \( k+2 \)) [in,out] a Upper triangular band matrix \( R^* \), dimension (nest,*)[in] nest Leading dimension of a[in,out] yi Scalar RHS contribution; updated by rotations [in,out] z RHS vector; positions j_start : j_endupdated[in] j_start First row index in \( R^* \) [in] j_end Last row index in \( R^* \)
- See also
- Dierckx, Ch. 5, §5.2.2 (pp. 76-79), Eq. 5.5, 5.14-5.16
- fp_rotate_shifted_vec — vector-RHS variant for parametric fitting
◆ fp_rotate_shifted_vec()
|
private |
Rotate a smoothing-matrix row into a band matrix with vector RHS.
Shifted-pivot, vector-RHS variant of the Givens rotation. Combines the shifted-pivot pattern of fp_rotate_shifted (always pivot on \( h(1) \), shift left) with the multi-dimensional RHS of fp_rotate_row_vec. Used by smoothing iterations in parametric fitting (fpcons, fppara) where the smoothing-matrix rows \( P \) (Eq. 5.5, bandwidth \( k+2 \)) are rotated into the already-triangularized observation matrix \( R \), with \( d \) coordinate curves sharing the same knot vector.
- Parameters
-
[in,out] h Row to rotate, length band. Shifted left at each step.[in] band Bandwidth (typically \( k+2 \)) [in,out] a Upper triangular band matrix \( R^* \), dimension (nest,*)[in] nest Leading dimension of a[in,out] xi Vector RHS contribution of length idim[in,out] z RHS array (n, idim), one column per coordinate dimension[in] j_start First row index in \( R^* \) [in] j_end Last row index in \( R^* \) [in] n Leading dimension of z[in] idim Number of coordinate dimensions
- See also
- Dierckx, Ch. 5, §5.2.2 (pp. 76-79), Eq. 5.5, 5.14-5.16
- fp_rotate_shifted — scalar-RHS variant
◆ fp_size_comm_expand_1d()
|
private |
Expand communication buffer into 1D integer(FP_SIZE) allocatable array.
◆ fp_size_comm_pack_1d()
|
private |
Pack 1D integer(FP_SIZE) allocatable array into communication buffer.
◆ fp_size_comm_size_1d()
|
private |
Calculate storage size for 1D integer(FP_SIZE) allocatable array.
◆ fpader()
|
private |
Evaluate all derivatives of a spline at a single point.
Computes all \( k+1 \) derivatives of a spline of order \( k_1 = k+1 \) at a point \( x \) in the knot interval \( [\lambda_l, \lambda_{l+1}) \):
\[ d(j) = s^{(j-1)}(x), \quad j = 1, \ldots, k_1 \]
Uses the stable recurrence scheme of de Boor, which first forms divided differences of the B-spline coefficients, then evaluates each derivative level by the standard B-spline recursion.
- Parameters
-
[in] t Knot vector \( \lambda_1, \ldots, \lambda_n \) [in] n Length of the knot vector [in] c B-spline coefficients, length \( n \) [in] k1 Spline order \( k+1 \) (= degree + 1) [in] x Evaluation point, \( \lambda_l \leq x < \lambda_{l+1} \) [in] l Knot interval index [out] d Array of derivatives: d(j)= \( s^{(j-1)}(x) \), \( j = 1, \ldots, k_1 \)
- See also
- Dierckx, Ch. 1, §1.4 (pp. 11-14): de Boor recurrence for derivatives
- de Boor, C. (1978). A Practical Guide to Splines. Springer.
◆ fpadno()
|
private |
Add a branch to the constraint-set binary tree.
Adds a new branch of length n1 to the triply linked binary tree used by the Theil-Van de Panne convexity procedure (§7.2). The branch represents a candidate active-constraint set; its nodes contain constraint indices from jbind(1:n1).
The tree maintains the ordering invariant \( \text{info}(k) < \text{info}(\text{right}(k)) \) and \( \text{info}(k) < \text{info}(\text{left}(k)) \), preventing duplicate constraint sets. If no free nodes are available, fpfrno is called to reclaim nodes; if that also fails, ier = 1.
- Parameters
-
[in] maxtr Size of the tree arrays [in,out] up Parent pointers; up(i) = 0marks a free node[in,out] left Left-child pointers [in,out] right Right-child pointers [in,out] info Constraint index stored at each node [in,out] count Next free node pointer [in,out] merk Terminal node of the most recent branch [in] jbind Constraint indices for the new branch, length n1[in] n1 Length of the new branch [out] ier Error flag: 0 = success, 1 = tree full

◆ fpadpo()
|
private |
Add a polynomial curve to a spline curve in B-spline representation.
Given a \( d \)-dimensional spline curve of degree \( k \) with knots \( t \) and coefficients \( c \), and a polynomial curve with B-spline coefficients \( c_p \) (on the knot vector \( [a, \ldots, a, b, \ldots, b] \)), computes the B-spline coefficients of their sum by inserting knots from \( t \) into the polynomial representation via fpinst, then adding coefficients.
- Parameters
-
[in] idim Number of curve dimensions \( d \) [in] t Knot vector of the spline, length n[in] n Number of knots [in,out] c B-spline coefficients; on exit, contains the sum [in] nc Length of c[in] k Spline degree [in] cp Polynomial B-spline coefficients, length np[in] np Length of cp[in,out] cc Work array, length nest[in,out] t1 Work array, length nest[in,out] t2 Work array, length nest
- See also
- Dierckx, Ch. 7, §7.1 (pp. 115-120)
- fpinst — single knot insertion; fppocu — polynomial construction

◆ fpback()
|
private |
Solve an upper triangular banded system by back-substitution.
Computes the B-spline coefficients \( c \) by solving the triangular system:
\[ R_1 \, c = z_1 \tag{4.14} \]
where \( R_1 \) is an \( n \times n \) upper triangular matrix with bandwidth \( k \), obtained from the QR factorization of the observation matrix \( E \).
Matrix structure
\( R_1 \) is stored as a(nest, k) where a(i,1) holds the diagonal element \( r_{i,i} \) and a(i,j) for \( j > 1 \) holds \( r_{i,i+j-1} \).
- Parameters
-
[in] a Upper triangular band matrix \( R_1 \), stored as a(nest, k)[in] z Right-hand side vector \( z_1 \) of length \( n \) [in] n Number of equations (= number of B-spline coefficients) [in] k Bandwidth of \( R_1 \) (= spline order \( k+1 \)) [in] nest Leading dimension of array a
- Returns
- Solution vector \( c \) of length \( n \)
- See also
- Dierckx, Ch. 4, §4.1.2 (pp. 55-58), Eq. 4.14
◆ fpbacp()
|
private |
Solve a bordered upper triangular system by back-substitution.
Computes the solution \( c \) of the system \( G \, c = z \) where \( G \) is an \( n \times n \) upper triangular matrix of the form:
\[ G = \begin{pmatrix} A & \cdot \\ 0 & B \end{pmatrix} \tag{6.6} \]
with \( A \) an \( (n-k) \times (n-k) \) upper triangular band matrix of bandwidth \( k_1 \), and \( B \) an \( n \times k \) dense matrix accounting for the periodic boundary conditions.
This arises in periodic spline fitting where the periodic B-splines \( \tilde{N}_{i,k+1} \) wrap around the domain, coupling the first and last \( k \) coefficients.
- Parameters
-
[in] a Upper triangular band matrix \( A \), stored as a(nest, k1)[in] b Dense coupling matrix \( B \), stored as b(nest, k)[in] z Right-hand side vector of length \( n \) [in] n Number of equations [in] k Number of periodic coupling columns [in] k1 Bandwidth of the triangular part \( A \) [in] nest Leading dimension of arrays aandb
- Returns
- Solution vector \( c \) of length \( n \)
- See also
- Dierckx, Ch. 6, §6.1 (pp. 95-100), Eq. 6.6
◆ fpbfou()
|
private |
Compute Fourier coefficients of cubic B-splines.
Calculates the Fourier sine and cosine integrals of each cubic B-spline \( N_{j,4}(x) \) over the active knot interval:
\[ \text{ress}(j) = \int_{\lambda_4}^{\lambda_{n-3}} N_{j,4}(x) \sin(\omega x) \, dx \]
\[ \text{resc}(j) = \int_{\lambda_4}^{\lambda_{n-3}} N_{j,4}(x) \cos(\omega x) \, dx \]
for \( j = 1, \ldots, n-4 \). Uses fpcsin to evaluate the weighted integrals over each knot span.
- Parameters
-
[in] t Knot vector, length n[in] n Number of knots [in] par Frequency \( \omega \) [out] ress Sine integrals, length n-4[out] resc Cosine integrals, length n-4
- See also
- Dierckx, Ch. 3, §3.3 (Fourier coefficients)
- fpcsin — weighted Fourier integrals of cubics

◆ fpbspl()
|
private |
Evaluate the non-zero B-splines at a given point.
Computes the \( k+1 \) non-zero B-splines of degree \( k \) at the point \( x \) satisfying \( \lambda_l \leq x < \lambda_{l+1} \), using the stable recurrence relation of de Boor and Cox:
\[ N_{i,1}(x) = \begin{cases} 1 & \text{if } \lambda_i \leq x < \lambda_{i+1} \\ 0 & \text{otherwise} \end{cases} \]
\[ N_{i,l+1}(x) = \frac{x - \lambda_i}{\lambda_{i+l} - \lambda_i} N_{i,l}(x) + \frac{\lambda_{i+l+1} - x}{\lambda_{i+l+1} - \lambda_{i+1}} N_{i+1,l}(x) \tag{1.24} \]
The result array h contains \( N_{l-k,k+1}(x), \ldots, N_{l,k+1}(x) \) in positions h(1:k+1). When knots have multiplicity (coincident knots), zero weights are used in the recurrence (convention \( 0/0 = 0 \)).
- Parameters
-
[in] t Knot vector \( \lambda_1, \ldots, \lambda_n \) [in] n Length of the knot vector [in] k Spline degree [in] x Evaluation point, must satisfy \( \lambda_l \leq x < \lambda_{l+1} \) [in] l Knot interval index, must satisfy \( k \leq l \leq n-k \)
- Returns
- Array of length
MAX_ORDER+1; positions1:k+1contain the \( k+1 \) non-zero B-spline values.
- Note
- Requires \( k \leq l \leq n-k \); this is not checked.
- See also
- Dierckx, Ch. 1, §1.3 (pp. 8-11), Eq. 1.22-1.24, 1.30

◆ fpchec()
|
private |
Verify knot positions against data points (Schoenberg-Whitney check).
Checks that the knots \( \lambda_j \), \( j = 1, \ldots, n \), of a spline of degree \( k \) satisfy all conditions required for a well-posed least-squares problem with data points \( x_i \), \( i = 1, \ldots, m \).
The conditions verified are:
- \( k+1 \leq n-k-1 \leq m \)
- \( \lambda_1 \leq \cdots \leq \lambda_{k+1} \) and \( \lambda_{n-k} \leq \cdots \leq \lambda_n \) (boundary knot monotonicity)
- \( \lambda_{k+2} < \lambda_{k+3} < \cdots < \lambda_{n-k} \) (interior knots strictly increasing)
- \( \lambda_{k+1} \leq x_1 \) and \( x_m \leq \lambda_{n-k} \)
- The Schoenberg-Whitney conditions: there exists a subset of data points \( y_j \) such that
\[ \lambda_j < y_j < \lambda_{j+k+1}, \quad j = 1, \ldots, n-k-1 \tag{4.5} \]
guaranteeing full rank of the observation matrix.
- Parameters
-
[in] x Data abscissae, strictly increasing: \( x_1 < \cdots < x_m \) [in] m Number of data points [in] t Knot vector \( \lambda_1, \ldots, \lambda_n \) [in] n Number of knots [in] k Spline degree
- Returns
FITPACK_OKif all conditions hold,FITPACK_INPUT_ERRORotherwise.
- See also
- Dierckx, Ch. 4, §4.1.1 (pp. 53-55), Eq. 4.5, 4.17
◆ fpched()
|
private |
Verify knot positions for a constrained spline (Schoenberg-Whitney check).
Checks that the knots \( \lambda_j \), \( j = 1, \ldots, n \), of a spline of degree \( k \) with \( i_b \) derivative constraints at \( x_1 \) and \( i_e \) constraints at \( x_m \), satisfy all conditions required for a well-posed least-squares problem:
- \( k+1 \leq n-k-1 \leq m + \max(0, i_b - 1) + \max(0, i_e - 1) \)
- Boundary knot monotonicity
- Interior knots strictly increasing
- \( \lambda_{k+1} \leq x_1 \) and \( x_m \leq \lambda_{n-k} \)
- Schoenberg-Whitney conditions (Eq. 4.5) for the subset of unconstrained equations
- Parameters
-
[in] x Data abscissae, strictly increasing [in] m Number of data points [in] t Knot vector \( \lambda_1, \ldots, \lambda_n \) [in] n Number of knots [in] k Spline degree [in] ib Number of derivative constraints at \( x_1 \) [in] ie Number of derivative constraints at \( x_m \)
- Returns
FITPACK_OKif all conditions hold,FITPACK_INPUT_ERRORotherwise.
- See also
- Dierckx, Ch. 8, §8.2 (pp. 141-146): constrained curve fitting
- Dierckx, Ch. 4, §4.1.1 (pp. 53-55), Eq. 4.5
◆ fpchep()
|
private |
Verify knot positions for a periodic spline (Schoenberg-Whitney check).
Checks that the knots \( \lambda_j \), \( j = 1, \ldots, n \), of a periodic spline of degree \( k \) satisfy all conditions required for a well-posed least-squares problem with data points \( x_i \):
- \( k+1 \leq n-k-1 \leq m+k-1 \)
- Boundary knot monotonicity
- Interior knots strictly increasing
- \( \lambda_{k+1} \leq x_1 \) and \( x_m \leq \lambda_{n-k} \)
- Schoenberg-Whitney conditions for the periodic basis: a subset \( y_j \) satisfying \( \lambda_j < y_j < \lambda_{j+k+1} \) must exist, where values may wrap around with period \( T = \lambda_{n-k} - \lambda_{k+1} \)
- Parameters
-
[in] x Data abscissae, strictly increasing [in] m Number of data points [in] t Knot vector \( \lambda_1, \ldots, \lambda_n \) [in] n Number of knots [in] k Spline degree
- Returns
FITPACK_OKif all conditions hold,FITPACK_INPUT_ERRORotherwise.
- See also
- Dierckx, Ch. 6, §6.1 (pp. 95-100): periodic spline fitting
- Dierckx, Ch. 4, §4.1.1 (pp. 53-55), Eq. 4.5
◆ fpclos()
|
private |
Core algorithm for closed (periodic) parametric curve fitting.
Fits a \( d \)-dimensional closed parametric spline curve where \( s(u_1) = s(u_m) \) and all derivatives match at the closure point. The periodicity constraint wraps the last \( k \) B-spline columns into the first \( k \), creating the block-triangular structure (Eq. 6.13):
\[ \begin{pmatrix} R_{11}^* & R_{12}^* \\ 0 & R_{22}^* \end{pmatrix} \tag{6.13} \]
which is factored using two-matrix Givens rotations (fp_rotate_row_2mat_vec). The smoothing-parameter search follows the same rational interpolation scheme as fpcurf.
- Parameters
-
[in] iopt 0 = new fit, 1 = continue [in] idim Number of curve dimensions \( d \) [in] m Number of data points [in] u Parameter values, length m[in] mx Length of x( \( = m \cdot d \))[in] x Data coordinates, interleaved, length mx[in] w Data weights, length m[in] k Spline degree [in] s Smoothing factor \( S \geq 0 \) [in] nest Max knots [in] tol Tolerance for smoothing condition [in] maxit Maximum smoothing-parameter iterations [in] k1 \( k + 1 \) [in] k2 \( k + 2 \) [in,out] n Number of knots [in,out] t Knot vector, length nest[in] nc Length of coefficient array c[in,out] c B-spline coefficients, length nc[in,out] fp Weighted sum of squared residuals [in,out] fpint Residual sums per knot interval [in,out] z Work: transformed RHS [in,out] a1 Work: band matrix \( R_{11}^* \) [in,out] a2 Work: band matrix \( R_{12}^*/R_{22}^* \) [in,out] b Work: smoothing matrix [in,out] g1 Work: band matrix copy [in,out] g2 Work: band matrix copy [in,out] q Work: B-spline values [in,out] nrdata Interior data-point counts [in,out] ier Error flag
- See also
- Dierckx, Ch. 6, §6.1-6.2 (pp. 95-112), Eq. 6.1-6.13
- fp_rotate_row_2mat_vec — two-matrix Givens rotation
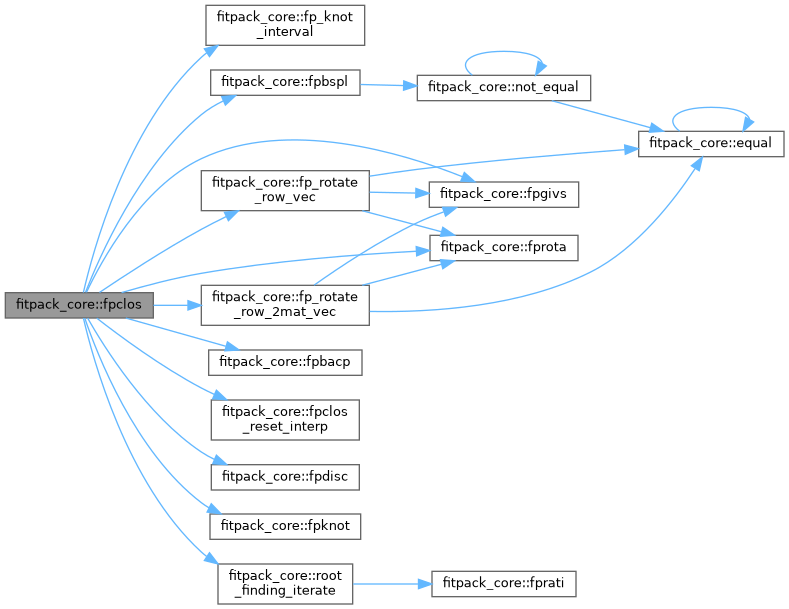
◆ fpclos_reset_interp()
|
private |
Set up the initial knot configuration for closed-curve interpolation.
When \( s = 0 \) (interpolation) and \( k \) is odd, places interior knots at the data parameter values. For \( k = 1 \) (linear), directly sets the B-spline coefficients from the data and returns the exact interpolant. When \( k \) is even, knots are placed at midpoints of consecutive parameters.
- Parameters
-
[in] idim Number of dimensions [in] k Spline degree [in] m Number of data points [in] mx Length of data array x(=m * idim)[in] n Number of knots [in] nc Length of coefficient array c[in] nest Maximum knots allowed [in,out] kk Adjusted degree for iteration [in,out] kk1 Adjusted order for iteration [in] u Parameter values, length m[in] x Data coordinates, length mx[in,out] t Knot vector, length nest[in,out] c B-spline coefficients, length nc[in,out] fp Weighted sum of squared residuals [in] per Period \( = u_m - u_1 \) [in] fp0 Upper bound for the smoothing factor [in] s Smoothing factor [in,out] fpint Knot interval contributions, length nest[in,out] nrdata Data point counts per interval, length nest[out] done .true.if the interpolant was fully determined
- See also
- Dierckx, Ch. 6, §6.1-6.2 (pp. 95-112): closed periodic spline fitting
◆ fpcoco()
|
private |
Fit a convexity-constrained cubic smoothing spline.
Determines a cubic spline approximation \( s(x) \) that satisfies the convexity (or concavity) constraints specified by \( v(i) \):
- \( v(i) = 1 \): \( s''(x_i) \geq 0 \) (local convexity)
- \( v(i) = -1 \): \( s''(x_i) \leq 0 \) (local concavity)
- \( v(i) = 0 \): no constraint at \( x_i \)
while minimizing the weighted sum of squared residuals subject to \( \sum (w_i (y_i - s(x_i)))^2 \leq S \). The algorithm uses the Theil-Van de Panne quadratic programming procedure with a binary tree (§7.2) to enumerate active-constraint sets.
- Parameters
-
[in] iopt Option: -1 = least-squares, 0 = new smoothing, 1 = continue from previous [in] m Number of data points [in] x Data abscissae, length m(strictly increasing)[in] y Data ordinates, length m[in] w Data weights, length m(positive)[in] v Convexity signs, length m[in] s Smoothing factor \( S \geq 0 \) [in] nest Max knots (workspace dimension) [in] maxtr Max tree nodes [in] maxbin Max active constraints [in,out] n Number of knots [in,out] t Knot vector, length nest[in,out] c B-spline coefficients, length nest[in,out] sq Weighted sum of squared residuals [in,out] sx Spline values at data points, length m[in,out] bind Active constraint flags, length nest[in,out] e Discontinuity coefficients, length nest[in,out] wrk Work array, length lwrk[in] lwrk Length of wrk[in,out] iwrk Integer work array, length kwrk[in] kwrk Length of iwrk[out] ier Error flag
- Note
- Error flags in fpcoco/cocosp do not match the global error messages.
- See also
- Dierckx, Ch. 7, §7.2 (pp. 125-130)
- fpcosp — core convexity-constrained fitting algorithm
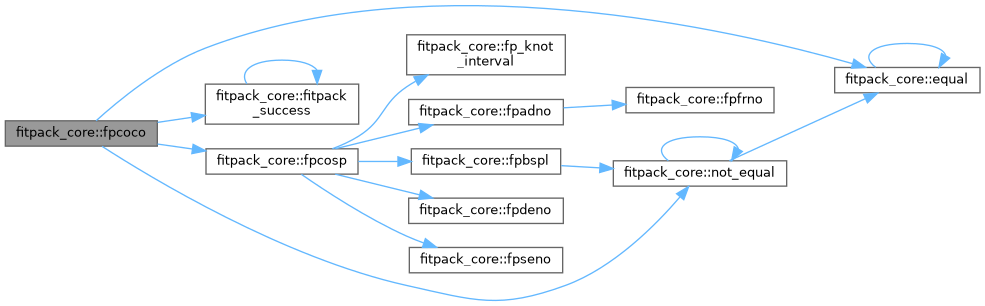
◆ fpcons()
|
private |
Core algorithm for constrained parametric curve fitting.
Fits a \( d \)-dimensional parametric spline curve \( s(u) = (s_1(u), \ldots, s_d(u)) \) subject to derivative constraints at the endpoints:
\[ s_j^{(l)}(u_1) = x_j^{(l)}, \quad l = 0, \ldots, i_b - 1 \]
\[ s_j^{(l)}(u_m) = x_j^{(l)}, \quad l = 0, \ldots, i_e - 1 \]
The algorithm first constructs a polynomial satisfying the constraints (via fppocu), then iteratively refines the knot set and solves the constrained least-squares system using Givens rotations.
- Parameters
-
[in] iopt 0 = new fit, 1 = continue [in] idim Number of curve dimensions \( d \) [in] m Number of data points [in] u Parameter values, length m[in] mx Length of x( \( = m \cdot d \))[in] x Data coordinates, interleaved, length mx[in] w Data weights, length m[in] ib Number of derivative constraints at start [in] ie Number of derivative constraints at end [in] k Spline degree [in] s Smoothing factor \( S \geq 0 \) [in] nest Max knots [in] tol Tolerance for smoothing condition [in] maxit Maximum smoothing-parameter iterations [in] k1 \( k + 1 \) [in] k2 \( k + 2 \) [in,out] n Number of knots [in,out] t Knot vector, length nest[in] nc Length of coefficient array c[in,out] c B-spline coefficients, length nc[in,out] fp Weighted sum of squared residuals [in,out] fpint Residual sums per knot interval [in,out] z Work: transformed RHS [in,out] a Work: band matrix [in,out] b Work: smoothing matrix [in,out] g Work: band matrix copy [in,out] q Work: B-spline values [in,out] nrdata Interior data-point counts [in,out] ier Error flag
- See also
- Dierckx, Ch. 8, §8.2 (pp. 141-146)
- fppocu — initial polynomial; fp_rotate_shifted_vec — smoothing rotation
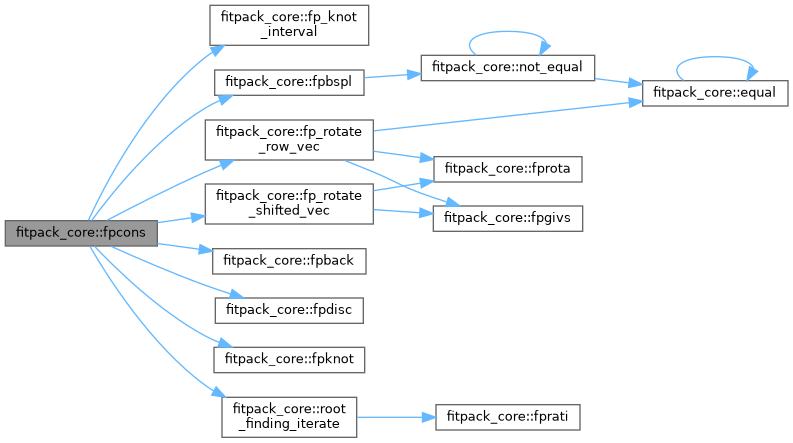
◆ fpcosp()
|
private |
Core algorithm for convexity-constrained cubic spline fitting.
Given a fixed knot set, solves the constrained least-squares problem using the Theil-Van de Panne active-set enumeration (§7.2). For each candidate active-constraint set (tracked in a binary tree), solves the equality-constrained system and checks feasibility and optimality via the Lagrange multipliers.
- Parameters
-
[in] m Number of data points [in] x Data abscissae, length m[in] y Data ordinates, length m[in] w Data weights, length m[in] n Number of knots [in] t Knot vector, length n[in] e Discontinuity jump coefficients, length n[in] maxtr Max tree nodes [in] maxbin Max active constraints [in,out] c B-spline coefficients, length n[out] sq Weighted sum of squared residuals [in,out] sx Spline values at data points, length m[in,out] bind Active constraint flags, length n[in] nm Dimension parameter [in] mb Dimension parameter [in,out] a Work matrix (n, 4)[in,out] b Work matrix (nm, maxbin)[in,out] const Constraint vector, length n[in,out] z Work vector, length n[in,out] zz Work vector, length n[in,out] u Work vector, length maxbin[in,out] q Work matrix (m, 4)[in,out] info Tree info array, length maxtr[in,out] up Tree parent pointers, length maxtr[in,out] left Tree left-child pointers, length maxtr[in,out] right Tree right-child pointers, length maxtr[in,out] jbind Work array for constraint indices, length mb[in,out] ibind Work array for constraint indices, length mb[out] ier Error flag
- See also
- Dierckx, Ch. 7, §7.1-7.2 (pp. 115-130)
- fpcoco — driver routine; fpadno, fpdeno, fpseno — tree operations
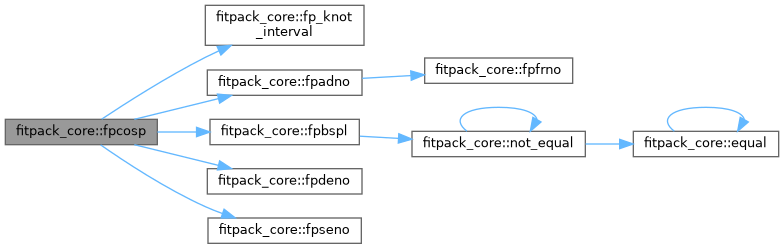
◆ fpcsin()
|
private |
Compute weighted Fourier integrals of a cubic polynomial.
Calculates the integrals:
\[ \text{ress} = \int_a^b (b-x)^3 \sin(\omega x) \, dx, \quad \text{resc} = \int_a^b (b-x)^3 \cos(\omega x) \, dx \]
given precomputed trigonometric values at the endpoints. Used by fpbfou to compute Fourier coefficients of B-splines.
- Parameters
-
[in] a Left endpoint [in] b Right endpoint [in] par Frequency \( \omega \) [in] sia \( \sin(\omega a) \) [in] coa \( \cos(\omega a) \) [in] sib \( \sin(\omega b) \) [in] cob \( \cos(\omega b) \) [out] ress Sine integral result [out] resc Cosine integral result
- See also
- Dierckx, Ch. 3, §3.3 (Fourier integrals)
- fpbfou — B-spline Fourier coefficient computation
◆ fpcurf()
|
private |
Core algorithm for univariate spline curve fitting.
Determines a smooth spline approximation \( s(x) \) of degree \( k \) on the interval \( [x_b, x_e] \) that satisfies the smoothing criterion:
\[ F_g(p) = \sum_{i=1}^{m} \bigl( w_i (y_i - s(x_i)) \bigr)^2 \leq S \tag{4.12} \]
The algorithm iterates over three levels:
- Knot selection (§5.3): adds knots at locations of maximum residual (Eq. 5.37-5.43) until the smoothing condition can be met.
- Weighted least-squares (§4.1): for each knot set, solves the banded system via QR with Givens rotations (Eq. 4.14-4.15).
- Smoothing parameter search (§5.2.4): finds \( p \) such that \( F_g(p) = S \) using rational interpolation (Eq. 5.30-5.32).
- Parameters
-
[in] iopt 0 = new fit, 1 = continue with more knots [in] x Data abscissae, length m(strictly increasing)[in] y Data ordinates, length m[in] w Data weights, length m(positive)[in] m Number of data points [in] xb Left boundary of approximation interval [in] xe Right boundary of approximation interval [in] k Spline degree ( \( 1 \leq k \leq 5 \)) [in] s Smoothing factor \( S \geq 0 \) [in] nest Max number of knots (workspace bound) [in] tol Tolerance for the smoothing condition [in] maxit Maximum iterations for the \( p \)-search [in] k1 \( k + 1 \) (spline order) [in] k2 \( k + 2 \) (smoothing bandwidth) [in,out] n Number of knots [in,out] t Knot vector, length nest[out] c B-spline coefficients, length nest[out] fp Weighted sum of squared residuals \( F_g(p) \) [in,out] fpint Residual sums per knot interval, length nest[in,out] z Work: transformed RHS, length nest[in,out] a Work: band matrix, (nest, k1)[in,out] b Work: smoothing matrix, (nest, k2)[in,out] g Work: band matrix copy, (nest, k2)[in,out] q Work: B-spline values, (m, k1)[in,out] nrdata Interior data-point counts per interval, length nest[out] ier Error flag
- See also
- Dierckx, Ch. 4, §4.1-4.2 (pp. 53-65); Ch. 5, §5.2-5.3 (pp. 73-94)
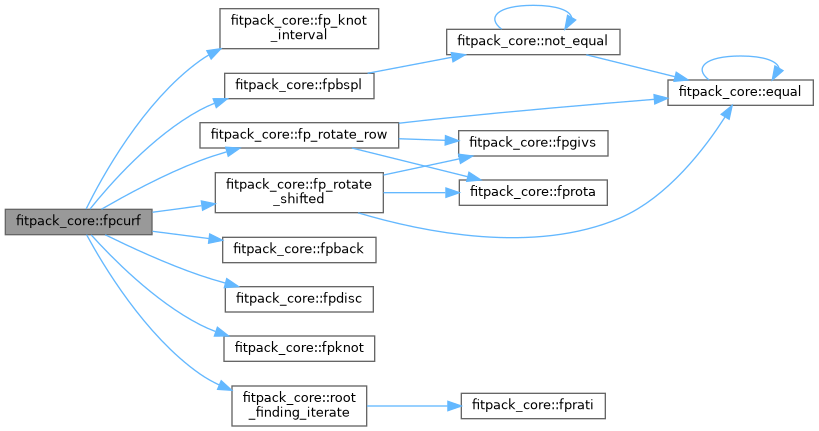
◆ fpcuro()
|
private |
Find the real zeros of a cubic polynomial.
Computes all real roots of the cubic polynomial:
\[ p(x) = a x^3 + b x^2 + c x + d \]
Handles the degenerate cases (linear, quadratic) and uses the standard trigonometric method for the irreducible case (three real roots) and Cardano's formula otherwise.
- Parameters
-
[in] a Coefficient of \( x^3 \) [in] b Coefficient of \( x^2 \) [in] c Coefficient of \( x \) [in] d Constant term [out] x Array of length 3 containing the real zeros [out] n Number of real zeros found ( \( 0 \leq n \leq 3 \))
◆ fpcyt1()
|
private |
LU-decompose a cyclic tridiagonal matrix.
Computes the LU decomposition of an \( n \times n \) cyclic tridiagonal matrix arising from periodic spline fitting. The matrix has the structure:
\[ \begin{pmatrix} a_{1,2} & a_{1,3} & & & & a_{1,1} \\ a_{2,1} & a_{2,2} & a_{2,3} & & & \\ & \ddots & \ddots & \ddots & & \\ & & a_{n-1,1} & a_{n-1,2} & a_{n-1,3} \\ a_{n,3} & & & & a_{n,1} & a_{n,2} \end{pmatrix} \]
The decomposition factors are stored in columns 4-6 of the array a. The back-substitution is performed by fpcyt2.
- Parameters
-
[in,out] a Matrix stored as a(nn,6). Columns 1-3 hold the tridiagonal + cyclic entries; columns 4-6 receive the LU factors.[in] n Matrix dimension [in] nn Leading dimension of a
- See also
- Dierckx, Ch. 6, §6.1 (pp. 95-100), Eq. 6.5-6.6
- fpcyt2 — back-substitution using the LU factors
◆ fpcyt2()
|
private |
Solve a cyclic tridiagonal system using LU factors from fpcyt1.
Solves the \( n \times n \) linear system \( A \, c = b \) where \( A \) is a cyclic tridiagonal matrix whose LU decomposition has been computed by fpcyt1 and stored in columns 4-6 of the array a.
- Parameters
-
[in] a LU-factored matrix from fpcyt1, dimension (nn, 6)[in] n System dimension [in] b Right-hand side vector, length n[out] c Solution vector, length n[in] nn Leading dimension of a
- See also
- Dierckx, Ch. 6, §6.1 (pp. 95-100), Eq. 6.5-6.6
- fpcyt1 — LU decomposition of the cyclic tridiagonal matrix
◆ fpdeno()
|
private |
Prune short branches from the constraint-set binary tree.
Frees all branches whose length is less than nbind by setting their up field to zero. This reclaims memory in the triply linked tree used by the Theil-Van de Panne procedure (§7.2), keeping only branches at the current search frontier.
On exit, merk points to the terminal node of the leftmost branch of length nbind, or is set to 1 if no such branch exists.
- Parameters
-
[in] maxtr Size of the tree arrays [in,out] up Parent pointers; freed nodes get up = 0[in] left Left-child pointers [in] right Right-child pointers [in] nbind Minimum branch length to retain [out] merk Terminal node of the leftmost surviving branch, or 1 if none
◆ fpdisc()
|
private |
Compute the discontinuity jumps of the B-spline derivatives.
Calculates the discontinuity jumps of the \( k \)-th derivative of the B-splines of degree \( k \) at the interior knots \( \lambda_{k+2}, \ldots, \lambda_{n-k-1} \). These coefficients \( a_{i,q} \) appear in the smoothness measure:
\[ a_{i,q} = \frac{(-1)^{k+1} \, k! \, (\lambda_{i+k+1} - \lambda_i)} {\displaystyle\prod_{\substack{j=q-k \\ j \neq i}}^{q} (\lambda_{q+1} - \lambda_{j+1})} \tag{5.6} \]
for \( q - k - 1 \leq i \leq q \), and zero otherwise. The output matrix \( B \) stores these values for use in evaluating the smoothing functional \( \sum_q [\sum_i c_i \, a_{i,q}]^2 \) (Eq. 5.5).
- Parameters
-
[in] t Knot vector \( \lambda_1, \ldots, \lambda_n \) [in] n Length of the knot vector [in] k2 Spline order \( k + 1 \) (= degree + 1) [out] b Discontinuity jump matrix, stored as b(nest, k2). Row \( q \) contains the \( k+1 \) non-zero jumps at interior knot \( \lambda_{q+k+1} \).[in] nest Leading dimension of array b
- See also
- Dierckx, Ch. 5, §5.2.2 (pp. 76-79), Eq. 5.5-5.6
◆ fpfrno()
|
private |
Collect free nodes from the constraint-set binary tree.
Scans the triply linked tree for free nodes (those with up = 0, previously released by fpdeno) and makes them available for reuse. If no free nodes are found, the error flag ier is set to 1.
This routine is called by fpadno when the tree needs a new node but the count pointer has exhausted the pre-allocated array.
- Parameters
-
[in] maxtr Size of the tree arrays [in,out] up Parent pointers; up(i) = 0marks a free node[in,out] left Left-child pointers [in,out] right Right-child pointers [in,out] info Constraint index stored at each node [in,out] point Pointer to the collected free-node chain [in,out] merk Terminal node of the current branch [in] n1 Maximum branch length [out] count Number of free nodes found [out] ier Error flag: 0 = success, 1 = no free nodes
◆ fpgivs()
|
private |
Compute parameters of a Givens plane rotation.
Given a pivot element \( e_i \) and a diagonal element \( r_i \), computes the cosine \( c \) and sine \( s \) of a Givens rotation that eliminates \( e_i \):
\[ r'_i = \sqrt{r_i^2 + e_i^2}, \quad c = \frac{r_i}{r'_i}, \quad s = \frac{e_i}{r'_i} \tag{4.15} \]
The rotation preserves orthogonality ( \( c^2 + s^2 = 1 \)) and is used to triangularize the observation matrix \( E \) row by row during the QR decomposition of the least-squares system.
- Parameters
-
[in] piv Pivot element \( e_i \) to be eliminated [in,out] ww On entry, diagonal element \( r_i \). On exit, updated value \( r'_i = \sqrt{r_i^2 + e_i^2} \). [out] cos Cosine of rotation angle [out] sin Sine of rotation angle
- See also
- Dierckx, Ch. 4, §4.1.2 (pp. 55-58), Eq. 4.15
◆ fpgrdi()
|
private |
Compute spline coefficients on a polar/spherical grid via Kronecker product.
Grid-based variant of the Kronecker product decomposition (Eq. 10.4-10.8) adapted for polar and spherical coordinates. Handles the periodic \( v \)-direction using two-matrix rotations (fp_rotate_2mat_stride) and incorporates origin/pole boundary conditions via the iop0/iop1 flags. The dz parameter provides prescribed values at \( u = 0 \) and/or \( u = 1 \).
Uses lback = .true. for back-substitution only (coefficients from a previous triangularization).
- Parameters
-
[in,out] ifsu Flag: 0 = recompute \( S_{pu} \) [in,out] ifsv Flag: 0 = recompute \( S_{pv} \) [in,out] ifbu Flag: 0 = recompute \( B_u \) [in,out] ifbv Flag: 0 = recompute \( B_v \) [in] lback .true.= back-substitution only[in] u Radial grid values, length mu[in] mu Number of radial grid points [in] v Angular grid values, length mv[in] mv Number of angular grid points [in] z Data values, length mz[in] mz Length of z[in] dz Boundary values at origin/edge [in] iop0 Boundary condition at \( u = 0 \) [in] iop1 Boundary condition at \( u = 1 \) [in] tu Radial knot vector [in] nu Number of radial knots [in] tv Angular knot vector [in] nv Number of angular knots [out] p Smoothing parameter (output) [in,out] c B-spline coefficients, length nc[in] nc Length of c[out] sq Sum of squared residuals [in,out] fp Weighted sum of squared residuals [in,out] fpu Residual sums per radial interval [in,out] fpv Residual sums per angular interval [in] mm Work dimension [in] mvnu Work dimension [in,out] spu Radial B-spline observation matrix [in,out] spv Angular B-spline observation matrix [in,out] right Work: RHS vector [in,out] q Work: RHS matrix [in,out] au Work: radial band matrix [in,out] av1 Work: angular band matrix (main block) [in,out] av2 Work: angular band matrix (periodic block) [in,out] bu Work: radial discontinuity jumps [in,out] bv Work: angular discontinuity jumps [in,out] aa Work: boundary constraint matrix [in,out] bb Work: boundary constraint matrix [in,out] cc Work: boundary constraint matrix [in,out] cosi Work: cosine integrals [in,out] nru Work: radial knot interval indices [in,out] nrv Work: angular knot interval indices
- See also
- Dierckx, Ch. 10, §10.2 (pp. 170-172), Eq. 10.4-10.8
- fp_rotate_2mat_stride — periodic grid Givens rotation
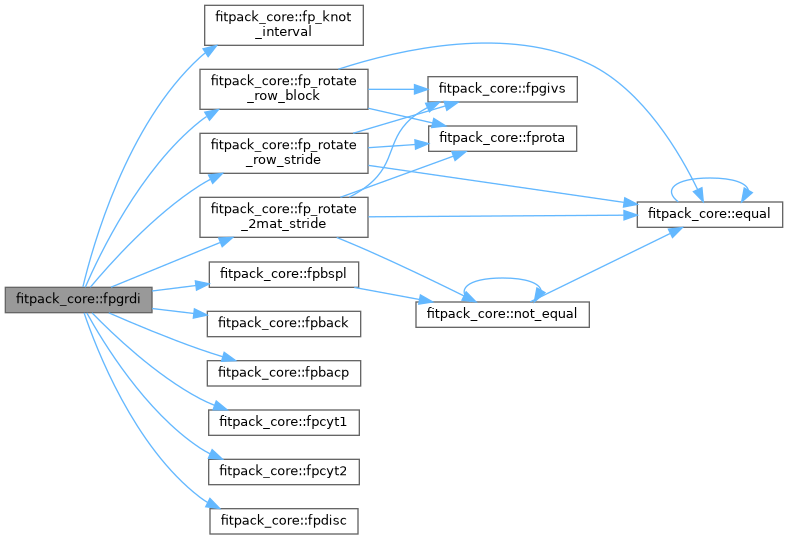
◆ fpgrpa()
|
private |
Compute parametric surface spline coefficients on a grid.
Grid-based Kronecker product decomposition (Eq. 10.9-10.12) for \( d \)-dimensional parametric surfaces. Computes the least-squares spline \( s_\infty(u,v) \) and the per-interval residual sums fpu(j) and fpv(j) needed for knot-placement decisions. Handles optional periodicity in \( u \) and/or \( v \) via the ipar flags, using two-matrix variants for periodic directions.
- Parameters
-
[in,out] ifsu Flag: 0 = recompute \( S_{pu} \) [in,out] ifsv Flag: 0 = recompute \( S_{pv} \) [in,out] ifbu Flag: 0 = recompute \( B_u \) [in,out] ifbv Flag: 0 = recompute \( B_v \) [in] idim Number of surface dimensions \( d \) [in] ipar Periodicity flags (packed) [in] u \( u \)-grid values, length mu[in] mu Number of \( u \)-grid points [in] v \( v \)-grid values, length mv[in] mv Number of \( v \)-grid points [in] z Data values, length mz[in] mz Length of z[in] tu \( u \)-knot vector [in] nu Number of \( u \)-knots [in] tv \( v \)-knot vector [in] nv Number of \( v \)-knots [in] p Smoothing parameter [in,out] c B-spline coefficients, length nc[in] nc Length of c[in,out] fp Total weighted sum of squared residuals [in,out] fpu Residual sums per \( u \)-interval [in,out] fpv Residual sums per \( v \)-interval [in] mm Work dimension [in] mvnu Work dimension [in,out] spu \( u \)-B-spline observation matrix [in,out] spv \( v \)-B-spline observation matrix [in,out] right Work: RHS vector [in,out] q Work: RHS matrix [in,out] au Work: \( u \)-band matrix (main) [in,out] au1 Work: \( u \)-band matrix (periodic) [in,out] av Work: \( v \)-band matrix (main) [in,out] av1 Work: \( v \)-band matrix (periodic) [in,out] bu Work: \( u \)-discontinuity jumps [in,out] bv Work: \( v \)-discontinuity jumps [in,out] nru Work: \( u \)-knot interval indices [in,out] nrv Work: \( v \)-knot interval indices
- See also
- Dierckx, Ch. 10, §10.3 (pp. 173-178), Eq. 10.9-10.12
- fptrnp, fptrpe — tensor-product triangularization
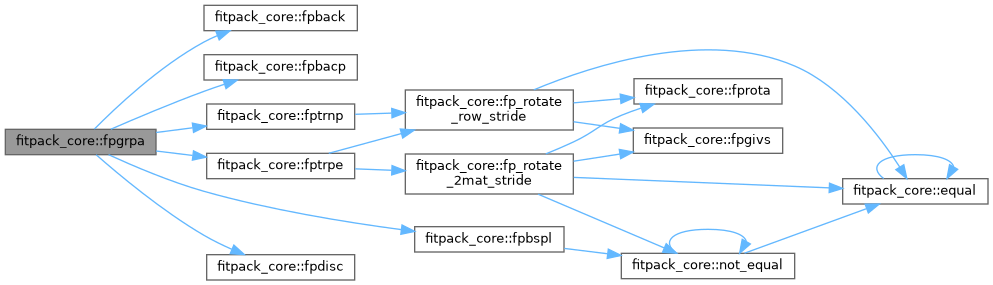
◆ fpgrre()
|
private |
Tensor-product least-squares gridded solver for dims dimensions.
For data on a rectangular grid \( \{x_i\} \times \{y_j\} \), solves the smoothing least-squares system using the Kronecker product structure (Eq. 10.4-10.8):
\[ A_y \, C \, A_x^T = Q \tag{10.4} \]
where the augmented observation matrices are:
\[ A_x = \begin{pmatrix} S_{px} \\ \frac{1}{\sqrt{p}} B_x \end{pmatrix}, \quad A_y = \begin{pmatrix} S_{py} \\ \frac{1}{\sqrt{p}} B_y \end{pmatrix} \tag{10.5} \]
The per-axis QR factorizations are performed independently using fp_rotate_row_block (column-access RHS) for the leading axes 1..dims-1 and fp_rotate_row_stride (row-access RHS) for the final axis, followed by per-axis back-substitution; residual sums fpint per knot interval are also computed for knot-placement decisions. This is the dimension-generic form: each pass reduces one axis, with the partially-reduced right-hand side held in a row-major "ping-pong" buffer that, after pass i, stores (coefficients along axes 1..i) x (data along axes i+1..dims). At dims=2 it is bit-for-bit identical to fpgrre: the leading pass is the single A_x block reduction (RHS width my), the final pass the A_y stride reduction, the back-substitution solves R_dims then descends to R_1, and the residual contraction is the same per-cell walk (the support sweep is a mixed-radix odometer whose innermost dot_product runs over the fastest axis — the floating-point reassociation anchor). The per-axis band/observation/discontinuity arrays are merged into rank-3 arrays with a uniform leading dimension (lda/ldb), passed as the explicit leading-dim argument to fp_rotate_*, fpback and fpdisc so every addressed element coincides with the original's separately-sized matrices — no copies, no value change.
- Parameters
-
[in] dims Number of axes (domain dimension) [in,out] ifs Per-axis flag: 0 = recompute observation matrix \( S_p \) (orig ifsx,ifsy) [in,out] ifb Per-axis flag: 0 = recompute discontinuity matrix \( B \) (orig ifbx,ifby) [in] xg Per-axis grid values; column \( d \) is xg(1:m(d),d)[in] m Number of grid points per axis, m(dims)[in] z Gridded data, flat row-major z(*)(axis 1 slowest)[in] k Degree per axis, k(dims)[in] t Per-axis knot vectors; column \( d \) is t(1:n(d),d)[in] n Number of knots per axis, n(dims)[in] p Smoothing parameter [in,out] c B-spline coefficients, length nc[in] nc Length of c[in,out] fp Total weighted sum of squared residuals [in,out] fpint Residual sums per knot interval, per axis (orig fpx,fpy) [in] mm Work dimension: widest gathered RHS fiber [in] mynx Work dimension: two ping-pong buffers ( \( my \cdot (nx-kx-1) \) at dims=2) [in,out] sp Per-axis B-spline observation matrices (orig spx,spy) [in,out] right Work: RHS vector for row rotations, length mm[in,out] q Work: ping-pong RHS buffer (two halves at dims>2), length mynx[in,out] a Per-axis band matrices, uniform leading dim (orig ax,ay) [in,out] b Per-axis discontinuity-jump matrices, uniform leading dim (orig bx,by) [in,out] nr Per-axis knot interval indices (orig nrx,nry)
- See also
- fpgrre, Dierckx Ch. 10 §10.2 (pp. 170-172) Eq. 10.4-10.8; fp_rotate_row_block, fp_rotate_row_stride — grid Givens rotations; todo/fitpack_nd_grids.md (slice 1, §2/§9)
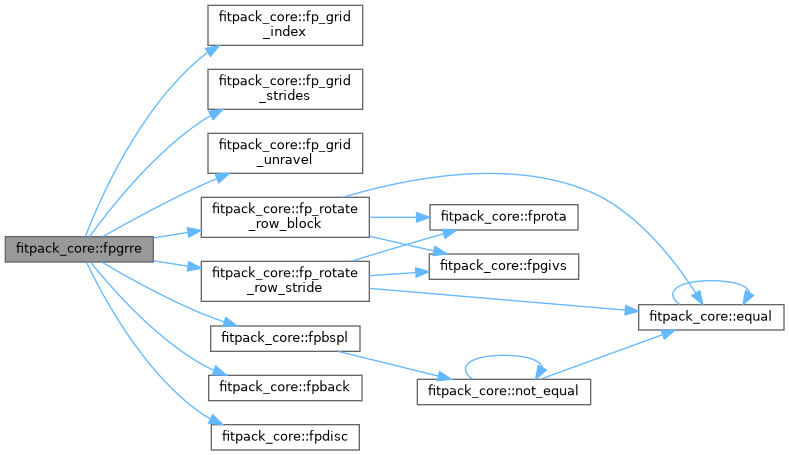
◆ fpgrsp()
|
private |
Compute spherical grid spline coefficients via Kronecker product.
Spherical-coordinate variant of fpgrdi for data on a \( \theta \times \phi \) grid. Handles pole-continuity constraints at \( \theta = 0 \) and \( \theta = \pi \) via the iop0/iop1 flags, and the periodic \( \phi \)-direction using two-matrix rotations. The dr parameter provides prescribed pole values.
- Parameters
-
[in,out] ifsu Flag: 0 = recompute \( S_{pu} \) [in,out] ifsv Flag: 0 = recompute \( S_{pv} \) [in,out] ifbu Flag: 0 = recompute \( B_u \) [in,out] ifbv Flag: 0 = recompute \( B_v \) [in] lback .true.= back-substitution only[in] u Co-latitude grid values \( \theta \), length mu[in] mu Number of \( \theta \)-grid points [in] v Longitude grid values \( \phi \), length mv[in] mv Number of \( \phi \)-grid points [in] r Data values, length mr[in] mr Length of r[in] dr Pole boundary values [in] iop0 Boundary condition at north pole ( \( \theta = 0 \)) [in] iop1 Boundary condition at south pole ( \( \theta = \pi \)) [in] tu \( \theta \)-knot vector [in] nu Number of \( \theta \)-knots [in] tv \( \phi \)-knot vector [in] nv Number of \( \phi \)-knots [in,out] p Smoothing parameter [in,out] c B-spline coefficients, length nc[in] nc Length of c[in,out] sq Sum of squared residuals [in,out] fp Weighted sum of squared residuals [in,out] fpu Residual sums per \( \theta \)-interval [in,out] fpv Residual sums per \( \phi \)-interval [in] mm Work dimension [in] mvnu Work dimension [in,out] spu \( \theta \)-B-spline observation matrix [in,out] spv \( \phi \)-B-spline observation matrix [in,out] right Work: RHS vector [in,out] q Work: RHS matrix [in,out] au Work: \( \theta \)-band matrix [in,out] av1 Work: \( \phi \)-band matrix (main) [in,out] av2 Work: \( \phi \)-band matrix (periodic) [in,out] bu Work: \( \theta \)-discontinuity jumps [in,out] bv Work: \( \phi \)-discontinuity jumps [in,out] a0 Work: north-pole constraint row [in,out] a1 Work: south-pole constraint row [in,out] b0 Work: north-pole smoothing row [in,out] b1 Work: south-pole smoothing row [in,out] c0 Work: north-pole cosine row [in,out] c1 Work: south-pole cosine row [in,out] cosi Work: cosine integrals [in,out] nru Work: \( \theta \)-knot interval indices [in,out] nrv Work: \( \phi \)-knot interval indices
- See also
- Dierckx, Ch. 11, §11.2 (pp. 205-213)
- fpgrdi — polar grid variant; fp_rotate_2mat_stride — periodic rotation
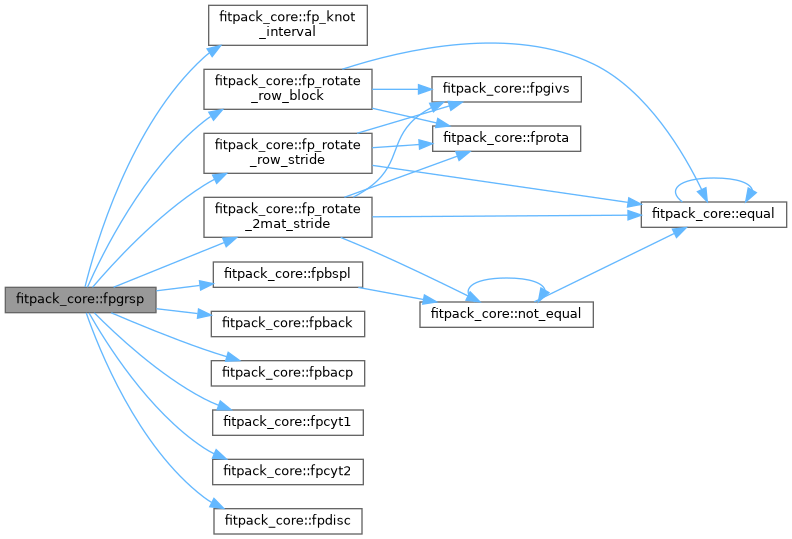
◆ fpinst()
|
private |
Insert a single knot into a B-spline representation.
Given the B-spline representation \( (t, c) \) of a degree- \( k \) spline, computes the new knot vector \( t' \) and coefficients \( c' \) that represent the same spline after inserting one additional knot \( x \in [\lambda_l, \lambda_{l+1}) \). Uses the Boehm (1980) one-knot-at-a-time algorithm:
\[ d_i = r_i \, c_i + (1 - r_i) \, c_{i-1} \tag{1.47} \]
where each weight \( r_i \in [0, 1] \) is a convex combination factor:
\[ r_i = \frac{\tau_{j+1} - \tau_i}{\tau_{i+k+1} - \tau_i} \tag{1.48} \]
For periodic splines (iopt /= 0), the boundary coefficients are wrapped accordingly. At least one of \( l > 2k \) or \( l < n - 2k \) must hold.
- Parameters
-
[in] iopt 0 = non-periodic spline, otherwise periodic [in] t Input knot vector, length n[in] n Number of input knots [in] c Input B-spline coefficients, length n-k-1[in] k Spline degree [in] x New knot to insert, \( \lambda_l \leq x < \lambda_{l+1} \) [in] l Knot interval index where xis inserted[out] tt Output knot vector, length nn[out] nn Number of output knots ( \( n + 1 \)) [out] cc Output B-spline coefficients, length nn-k-1[in] nest Leading dimension of arrays t,c,tt,cc
- See also
- Dierckx, Ch. 1, §1.3.4 (pp. 34-37), Eq. 1.46-1.48
◆ fpintb()
|
private |
Compute definite integrals of the normalized B-splines.
Calculates the definite integrals of each of the \( n-k-1 \) normalized B-splines \( N_{j,k+1}(u) \) of degree \( k \) over the interval \( [x, y] \):
\[ \text{bint}(j) = \int_x^y N_{j,k+1}(u) \, du \]
Uses the Gaffney formula for indefinite integrals of B-splines, which exploits the identity (Eq. 1.42):
\[ \int_{\lambda_j}^{u} N_{j,k+1}(v) \, dv = \frac{\lambda_{j+k+1} - \lambda_j}{k+1} \sum_{i=j+1}^{g+k+1} N_{i,k+2}(u) \tag{1.42} \]
- Parameters
-
[in] t Knot vector \( \lambda_1, \ldots, \lambda_n \) [in] n Number of knots [out] bint Array of length nk1; \( \text{bint}(j) = \int_x^y N_{j,k+1}(u)\,du \)[in] nk1 Number of B-splines ( \( n - k - 1 \)) [in] x Lower integration limit [in] y Upper integration limit
- See also
- Dierckx, Ch. 1, §1.3.3 (pp. 30-33), Eq. 1.42-1.44
- Dierckx, Ch. 3, §3.2 (pp. 44-46), Eq. 3.8-3.10
◆ fpknot()
|
private |
Select and insert a new knot at the location of maximum residual.
Locates the knot interval \( [\lambda_j, \lambda_{j+1}] \) with the largest sum of squared residuals \( \delta_j \) (Eq. 5.43) and inserts a new knot at the midpoint of its interior data points. This is the greedy knot-placement strategy used by the iterative smoothing spline algorithm:
\[ \delta_j = \sideset{}{''}{\sum}_{r=u_j+1}^{u_j+m_j} \bigl( w_r (y_r - S_{g}(x_r)) \bigr)^2 \tag{5.43} \]
Only intervals with at least one interior data point ( \( m_j > 2 \)) are eligible. The new knot is placed at \( x_{u_j + \lceil m_j/2 \rceil + 1} \). After insertion, fpint and nrdata are split to reflect the two new sub-intervals.
- Parameters
-
[in] x Data abscissae, length m[in] m Number of data points [in,out] t Knot vector; new knot inserted on exit [in,out] n Number of knots; incremented by 1 on exit [in,out] fpint Residual sum of squares per knot interval [in,out] nrdata Number of interior data points per interval [in,out] nrint Number of knot intervals; incremented by 1 [in] nest Leading dimension of arrays t,fpint,nrdata[in] istart Smallest eligible data index minus one
- See also
- Dierckx, Ch. 5, §5.3 (pp. 87-94), Eq. 5.37-5.43
◆ fpndsp()
| pure subroutine, public fitpack_core::fpndsp | ( | integer(fp_dim), intent(in) | dims, |
| real(fp_real), dimension(:,:), intent(in) | t, | ||
| integer(fp_size), dimension(dims), intent(in) | n, | ||
| real(fp_real), dimension(:), intent(in) | c, | ||
| integer(fp_size), dimension(dims), intent(in) | k, | ||
| real(fp_real), dimension(:,:), intent(in) | xg, | ||
| integer(fp_size), dimension(dims), intent(in) | m, | ||
| real(fp_real), dimension(:), intent(out) | z, | ||
| real(fp_real), dimension(:,:,:), intent(out) | w, | ||
| integer(fp_size), dimension(:,:), intent(out) | lidx ) |
Evaluate a tensor-product spline on a grid (any dimension; bispev's kernel).
Computes the values of a bivariate spline \( s(x, y) \) of degrees \( k_x \) and \( k_y \) at the grid points \( (x_i, y_j) \), \( i = 1, \ldots, m_x \), \( j = 1, \ldots, m_y \).
The evaluation uses the two-step algorithm: first compute the B-spline basis values in each direction, then assemble:
\[ s(x, y) = \sum_{i} \left( \sum_{j} c_{i,j} \, M_{j, k_y+1}(y) \right) N_{i, k_x+1}(x) \tag{2.14-2.15} \]
At dims=2 this reproduces the classic bivariate contraction bit-for-bit: both the per-axis basis-table build and the evaluation contraction are dimension-generic runtime loops over the dims axes, with the innermost dot_product on the fastest (axis dims, contiguous) coefficient axis as the FP-reassociation anchor. The B-spline values and knot interval indices are stored per axis in workspace arrays w and lidx (one column per axis) for reuse.
- Parameters
-
[in] dims Number of axes (domain dimension) [in] t Per-axis knot vectors; column \( d \) is t(1:n(d),d)[in] n Number of knots per axis, n(dims)[in] c B-spline coefficient tensor, flat row-major (first axis varies slowest) [in] k Spline degree per axis, k(dims)[in] xg Per-axis evaluation grids; column \( d \) is xg(1:m(d),d)[in] m Number of evaluation points per axis, m(dims)[out] z Spline values at grid points, flat row-major (first axis varies slowest) [out] w Per-axis B-spline basis values, w(k(d)+1,m(d),d)(basis-major, one page per axis)[out] lidx Per-axis knot interval indices, lidx(m(d),d)(one column per axis)
- See also
- bispev, Dierckx Ch. 2 §2.1.2 (pp. 28-30) Eq. 2.14-2.17; todo/fitpack_nd_grids.md (slice 1)
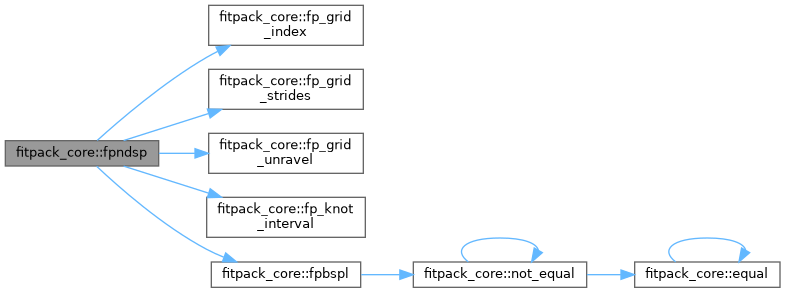
◆ fpopdi()
|
private |
Compute smoothing spline on a polar grid with origin constraints.
Given data on a \( (u, v) \) grid (radial \( \times \) angular), determines the B-spline coefficients of a bicubic smoothing spline \( s_p(u,v) \) periodic in \( v \), satisfying origin-continuity constraints:
- \( s(\lambda_1^u, v) = z_0 \) (constant at origin)
- \( \partial s / \partial u |_{u=0} = dz(2)\cos v + dz(3)\sin v \) (if
iopt(2) = 1) - \( s(\lambda_{n_u}^u, v) = 0 \) (if
iopt(3) = 1)
The unknown boundary parameters dz(i) (when not prescribed) are optimized to minimize the residual sum of squares, which is a quadratic function of dz. Delegates the grid QR factorization to fpgrdi.
- Parameters
-
[in,out] ifsu Flag: 0 = recompute radial B-splines [in,out] ifsv Flag: 0 = recompute angular B-splines [in,out] ifbu Flag: 0 = recompute radial discontinuities [in,out] ifbv Flag: 0 = recompute angular discontinuities [in] u Radial grid values, length mu[in] mu Number of radial points [in] v Angular grid values, length mv[in] mv Number of angular points [in] z Data values, length mz[in] mz Length of z[in] z0 Value at origin (prescribed or initial guess) [in,out] dz Boundary derivative parameters (3 values) [in] iopt Constraint options (3 flags) [in] ider Derivative specification flags [in] tu Radial knot vector [in] nu Number of radial knots [in] tv Angular knot vector [in] nv Number of angular knots [in] nuest Max radial knots [in] nvest Max angular knots [in,out] p Smoothing parameter [in] step Search step for boundary parameter optimization [in,out] c B-spline coefficients, length nc[in] nc Length of c[in,out] fp Weighted sum of squared residuals [in,out] fpu Residual sums per radial interval [in,out] fpv Residual sums per angular interval [in,out] nru Radial knot interval indices [in,out] nrv Angular knot interval indices [in,out] wrk Work array [in] lwrk Length of wrk
- See also
- Dierckx, Ch. 11, §11.1 (pp. 197-205)
- fpgrdi — grid QR factorization; fppogr — polar grid driver
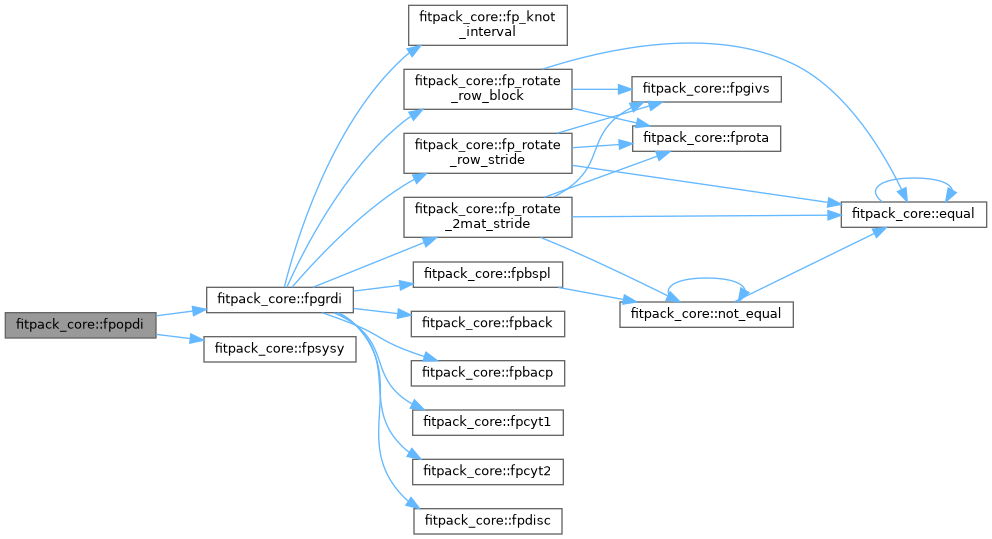
◆ fpopsp()
|
private |
Compute smoothing spline on a spherical grid with pole constraints.
Spherical counterpart of fpopdi. Given data on a \( (\theta, \phi) \) grid, determines a bicubic smoothing spline \( s_p(\theta,\phi) \) periodic in \( \phi \), satisfying pole-continuity constraints at both poles:
- \( s(0, \phi) = r_0 \) (north pole value)
- \( s(\pi, \phi) = r_1 \) (south pole value)
- Optional derivative constraints: \( \partial s / \partial \theta |_{\theta=0} = dr(2)\cos\phi + dr(3)\sin\phi \)
Unknown pole parameters dr(i) are optimized to minimize the residual. Delegates to fpgrsp for the grid QR factorization.
- Parameters
-
[in,out] ifsu Flag: 0 = recompute \( \theta \)-B-splines [in,out] ifsv Flag: 0 = recompute \( \phi \)-B-splines [in,out] ifbu Flag: 0 = recompute \( \theta \)-discontinuities [in,out] ifbv Flag: 0 = recompute \( \phi \)-discontinuities [in] u Co-latitude grid \( \theta \), length mu[in] mu Number of \( \theta \)-points [in] v Longitude grid \( \phi \), length mv[in] mv Number of \( \phi \)-points [in] r Data values, length mr[in] mr Length of r[in] r0 North-pole value (prescribed or initial guess) [in] r1 South-pole value (prescribed or initial guess) [in,out] dr Pole derivative parameters (6 values) [in] iopt Constraint options [in] ider Derivative specification flags [in] tu \( \theta \)-knot vector [in] nu Number of \( \theta \)-knots [in] tv \( \phi \)-knot vector [in] nv Number of \( \phi \)-knots [in] nuest Max \( \theta \)-knots [in] nvest Max \( \phi \)-knots [in,out] p Smoothing parameter [in] step Search step for pole parameter optimization [in,out] c B-spline coefficients, length nc[in] nc Length of c[in,out] fp Weighted sum of squared residuals [in,out] fpu Residual sums per \( \theta \)-interval [in,out] fpv Residual sums per \( \phi \)-interval [in,out] nru \( \theta \)-knot interval indices [in,out] nrv \( \phi \)-knot interval indices [in,out] wrk Work array [in] lwrk Length of wrk
- See also
- Dierckx, Ch. 11, §11.2 (pp. 205-213)
- fpgrsp — spherical grid QR factorization; fpspgr — spherical grid driver
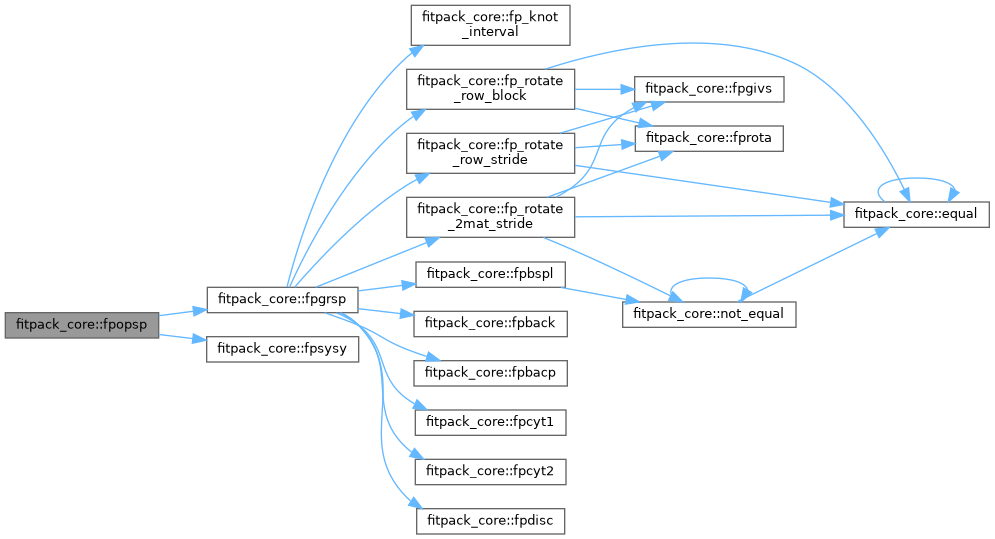
◆ fporde()
|
private |
Sort scattered data points into rectangular panels.
Assigns each data point \( (x_i, y_i) \), \( i = 1, \ldots, m \), to the rectangular panel \( R_{u,v} \) defined by \( \lambda_u^x \leq x < \lambda_{u+1}^x \) and \( \lambda_v^y \leq y < \lambda_{v+1}^y \).
For each panel, a linked-list stack is built:
index(j)points to the first data point in panel \( j \)nummer(i)gives the next data point in the same panel
This panel ordering enables efficient row-by-row construction of the observation matrix, since only the \( (k_x+1)(k_y+1) \) B-splines supported on a given panel contribute non-zero entries.
- Parameters
-
[in] x Data abscissae, length m[in] y Data ordinates, length m[in] m Number of data points [in] kx Spline degree in \( x \) [in] ky Spline degree in \( y \) [in] tx Knot vector in \( x \), length nx[in] nx Number of knots in \( x \) [in] ty Knot vector in \( y \), length ny[in] ny Number of knots in \( y \) [out] nummer Linked-list next pointers, length m[out] index Panel head pointers, length nreg[in] nreg Number of panels \( = (n_x - 2k_x - 1)(n_y - 2k_y - 1) \)
- See also
- Dierckx, Ch. 9, §9.1 (pp. 147-150)

◆ fppara()
|
private |
Core algorithm for open parametric curve fitting.
Fits a \( d \)-dimensional parametric spline curve \( s(u) = (s_1(u), \ldots, s_d(u)) \) of degree \( k \) on the parameter interval \( [u_b, u_e] \). All \( d \) coordinate curves share the same knot vector and are fitted simultaneously:
\[ \sum_{i=1}^{m} w_i^2 \sum_{j=1}^{d} (x_{i,j} - s_j(u_i))^2 \leq S \tag{6.9} \]
The algorithm follows the same three-level iteration as fpcurf (knot selection, QR factorization, smoothing-parameter search) but uses vector-RHS Givens rotations (fp_rotate_row_vec) to process all dimensions in a single pass.
- Parameters
-
[in] iopt 0 = new fit, 1 = continue [in] idim Number of curve dimensions \( d \) [in] m Number of data points [in] u Parameter values, length m[in] mx Length of x( \( = m \cdot d \))[in] x Data coordinates, interleaved, length mx[in] w Data weights, length m[in] ub Left boundary of parameter interval [in] ue Right boundary of parameter interval [in] k Spline degree [in] s Smoothing factor \( S \geq 0 \) [in] nest Max knots [in] tol Tolerance for smoothing condition [in] maxit Maximum smoothing-parameter iterations [in] k1 \( k + 1 \) [in] k2 \( k + 2 \) [in,out] n Number of knots [in,out] t Knot vector, length nest[in,out] nc Length of coefficient array c[in,out] c B-spline coefficients, length nc[in,out] fp Weighted sum of squared residuals [in,out] fpint Residual sums per knot interval [in,out] z Work: transformed RHS [in,out] a Work: band matrix [in,out] b Work: smoothing matrix [in,out] g Work: band matrix copy [in,out] q Work: B-spline values [in,out] nrdata Interior data-point counts [in,out] ier Error flag
- See also
- Dierckx, Ch. 6, §6.3 (pp. 112-114), Eq. 6.9
- fp_rotate_row_vec — vector-RHS Givens rotation
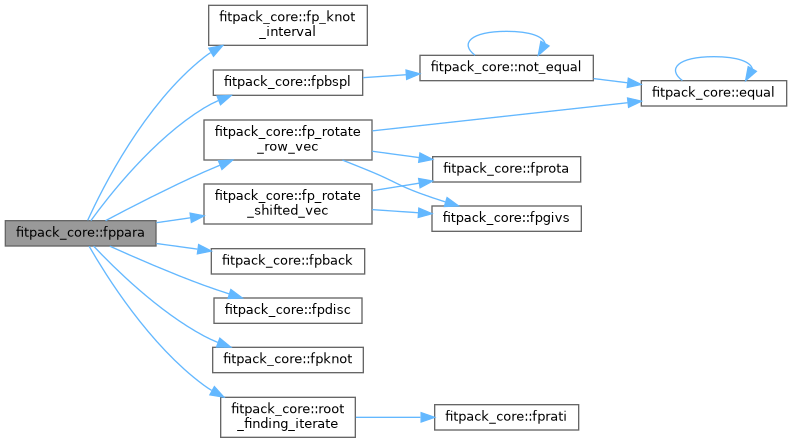
◆ fppasu()
|
private |
Core algorithm for parametric surface fitting on a grid.
Fits a \( d \)-dimensional parametric tensor-product spline surface \( s(u,v) = (s_1(u,v), \ldots, s_d(u,v)) \) to data on a rectangular grid \( \{u_i\} \times \{v_j\} \). Uses the Kronecker product decomposition (Eq. 10.9-10.12) that separates the bivariate problem into sequences of univariate operations:
\[ (A_u \otimes A_v) \, c = z \tag{10.9} \]
The \( u \)- and \( v \)-direction triangularizations are performed independently (via fp_rotate_row_block and fp_rotate_row_stride), followed by back-substitution.
- Parameters
-
[in] iopt 0 = new fit, 1 = continue [in] ipar Periodicity flags (packed) [in] idim Number of surface dimensions \( d \) [in] u \( u \)-grid values, length mu[in] mu Number of \( u \)-grid points [in] v \( v \)-grid values, length mv[in] mv Number of \( v \)-grid points [in] z Data values, length mz( \( = mu \cdot mv \cdot d \))[in] mz Length of z[in] s Smoothing factor \( S \geq 0 \) [in] nuest Max \( u \)-knots [in] nvest Max \( v \)-knots [in] tol Smoothing condition tolerance [in] maxit Maximum smoothing-parameter iterations [in,out] nc Length of coefficient array [in,out] nu Number of \( u \)-knots [in,out] tu \( u \)-knot vector [in,out] nv Number of \( v \)-knots [in,out] tv \( v \)-knot vector [in,out] c B-spline coefficients [in,out] fp Weighted sum of squared residuals [in,out] fp0 Initial residual sum [in,out] fpold Previous residual sum [in,out] reducu Residual reduction in \( u \) [in,out] reducv Residual reduction in \( v \) [in,out] fpintu Residual sums per \( u \)-interval [in,out] fpintv Residual sums per \( v \)-interval [in,out] lastdi Last direction of knot addition [in,out] nplusu Number of \( u \)-knots to add [in,out] nplusv Number of \( v \)-knots to add [in,out] nru Work: \( u \)-knot interval indices [in,out] nrv Work: \( v \)-knot interval indices [in,out] nrdatu Interior data counts per \( u \)-interval [in,out] nrdatv Interior data counts per \( v \)-interval [in,out] wrk Work array [in,out] lwrk Length of wrk[in,out] ier Error flag
- See also
- Dierckx, Ch. 10, §10.3 (pp. 173-178), Eq. 10.9-10.12
- fpgrre, fpgrdi — grid triangularization helpers
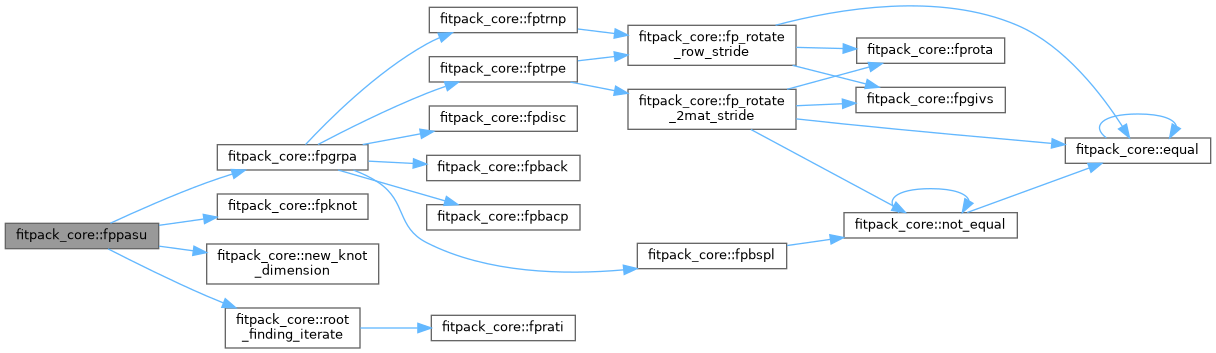
◆ fpperi()
|
private |
Core algorithm for univariate periodic spline fitting.
Fits a periodic spline \( s(x) \) of degree \( k \) where \( s^{(j)}(x_1) = s^{(j)}(x_m) \) for \( j = 0, \ldots, k-1 \). The periodicity reduces the number of free coefficients to \( n - 2k - 1 \) and wraps the B-spline columns into the block-triangular structure (Eq. 6.13) analogous to fpclos.
This is the scalar-valued counterpart of fpclos (which handles multi-dimensional parametric curves). Uses two-matrix Givens rotations (fp_rotate_row_2mat) for the periodic block structure.
- Parameters
-
[in] iopt 0 = new fit, 1 = continue [in] x Data abscissae, length m(strictly increasing)[in] y Data ordinates, length m[in] w Data weights, length m[in] m Number of data points [in] k Spline degree [in] s Smoothing factor \( S \geq 0 \) [in] nest Max knots [in] tol Tolerance for smoothing condition [in] maxit Maximum smoothing-parameter iterations [in] k1 \( k + 1 \) [in] k2 \( k + 2 \) [in,out] n Number of knots [in,out] t Knot vector, length nest[in,out] c B-spline coefficients, length nest[in,out] fp Weighted sum of squared residuals [in,out] fpint Residual sums per knot interval [in,out] z Work: transformed RHS [in,out] a1 Work: band matrix \( R_{11}^* \) [in,out] a2 Work: band matrix \( R_{12}^*/R_{22}^* \) [in,out] b Work: smoothing matrix [in,out] g1 Work: band matrix copy [in,out] g2 Work: band matrix copy [in,out] q Work: B-spline values [in,out] nrdata Interior data-point counts [in,out] ier Error flag
- See also
- Dierckx, Ch. 6, §6.1-6.2 (pp. 95-112), Eq. 6.1-6.8
- fp_rotate_row_2mat — two-matrix scalar Givens rotation
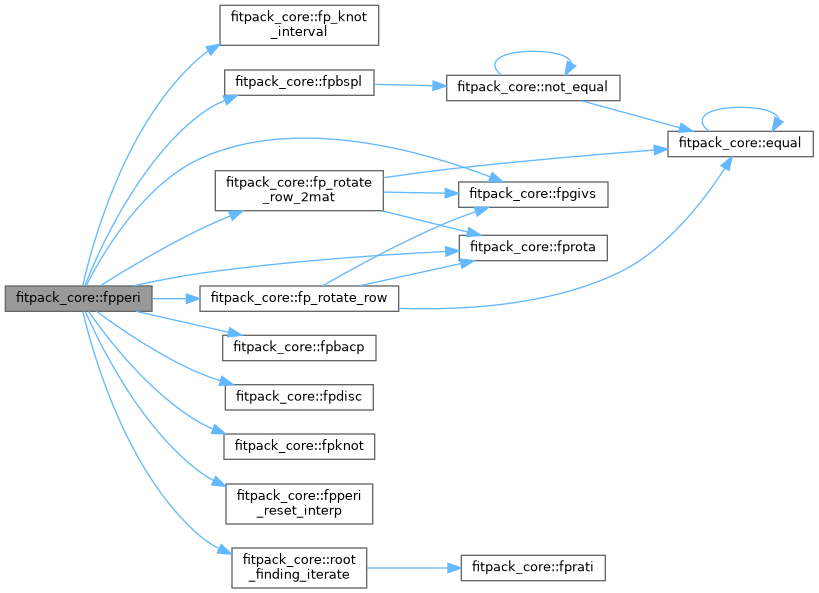
◆ fpperi_reset_interp()
|
private |
Set up the initial knot configuration for periodic spline interpolation.
When \( s = 0 \) (interpolation) and \( k \) is odd, places interior knots at the data abscissae. For \( k = 1 \) (linear), directly sets the B-spline coefficients from the data and returns the exact interpolant. When \( k \) is even, knots are placed at midpoints of consecutive abscissae.
- Parameters
-
[in] k Spline degree [in] m Number of data points [in] n Number of knots [in] nest Maximum knots allowed [in,out] kk Adjusted degree for iteration [in,out] kk1 Adjusted order for iteration [in] x Data abscissae, length m[in] y Data ordinates, length m[in,out] t Knot vector, length nest[in,out] c B-spline coefficients, length nest[in,out] fp Weighted sum of squared residuals [in] per Period \( = x_m - x_1 \) [in] fp0 Upper bound for the smoothing factor [in] s Smoothing factor [in,out] fpint Knot interval contributions, length nest[in,out] nrdata Data point counts per interval, length nest[out] done .true.if the interpolant was fully determined
- See also
- Dierckx, Ch. 6, §6.1-6.2 (pp. 95-112): periodic spline fitting
◆ fppocu()
|
private |
Construct a polynomial curve satisfying endpoint derivative constraints.
Finds a \( d \)-dimensional polynomial curve \( p(u) = (p_1(u), \ldots, p_d(u)) \) of degree \( k \) that satisfies prescribed derivative values at the endpoints \( a \) and \( b \):
\[ p_j^{(l)}(a) = \text{db}(d \cdot l + j), \quad l = 0, \ldots, i_b - 1 \]
\[ p_j^{(l)}(b) = \text{de}(d \cdot l + j), \quad l = 0, \ldots, i_e - 1 \]
The result is returned as B-spline coefficients cp(1:np) on the knot vector \( [a, \ldots, a, b, \ldots, b] \) (each with multiplicity \( k+1 \)). Used by concur to build an initial polynomial approximation for constrained parametric curves.
- Parameters
-
[in] idim Number of curve dimensions \( d \) [in] k Polynomial degree [in] a Left endpoint [in] b Right endpoint [in] ib Number of derivative conditions at \( a \) [in] db Derivative values at \( a \), length nb[in] nb Length of db( \( = d \cdot i_b \))[in] ie Number of derivative conditions at \( b \) [in] de Derivative values at \( b \), length ne[in] ne Length of de( \( = d \cdot i_e \))[out] cp B-spline coefficients of the polynomial, length np[in] np Length of cp( \( = d \cdot (k+1) \))
- See also
- Dierckx, Ch. 7, §7.1 (pp. 115-120)
◆ fppogr()
|
private |
Driver for polar grid smoothing spline with knot selection.
Outer iteration loop for fitting a smoothing spline on a polar grid. Manages the knot-selection strategy (adding knots in the radial or angular direction based on residuals) and the smoothing-parameter search, delegating the actual grid computation to fpopdi at each step.
- Parameters
-
[in] iopt Fitting options (3 flags) [in] ider Derivative specification flags [in] u Radial grid, length mu[in] mu Number of radial points [in] v Angular grid, length mv[in] mv Number of angular points [in] z Data values, length mz[in] mz Length of z[in] z0 Origin value [in] r Boundary function values, length mv[in] s Smoothing factor \( S \geq 0 \) [in] nuest Max radial knots [in] nvest Max angular knots [in] tol Smoothing condition tolerance [in] maxit Maximum smoothing-parameter iterations [in] nc Length of coefficient array [in,out] nu Number of radial knots [in,out] tu Radial knot vector [in,out] nv Number of angular knots [in,out] tv Angular knot vector [in,out] c B-spline coefficients [in,out] fp Weighted sum of squared residuals [in,out] fp0 Initial residual [in,out] fpold Previous residual [in,out] reducu Residual reduction in radial direction [in,out] reducv Residual reduction in angular direction [in,out] fpintu Residual sums per radial interval [in,out] fpintv Residual sums per angular interval [in,out] dz Boundary derivative parameters [in] step Search step for boundary optimization [in,out] lastdi Last direction of knot addition [in,out] nplusu Number of radial knots to add [in,out] nplusv Number of angular knots to add [in,out] lasttu Last radial knot change flag [in,out] nru Radial knot interval indices [in,out] nrv Angular knot interval indices [in,out] nrdatu Interior data counts per radial interval [in,out] nrdatv Interior data counts per angular interval [in,out] wrk Work array [in] lwrk Length of wrk[in,out] ier Error flag
- See also
- Dierckx, Ch. 11, §11.1 (pp. 197-205)
- fpopdi — grid computation; fppola — scattered polar fitting
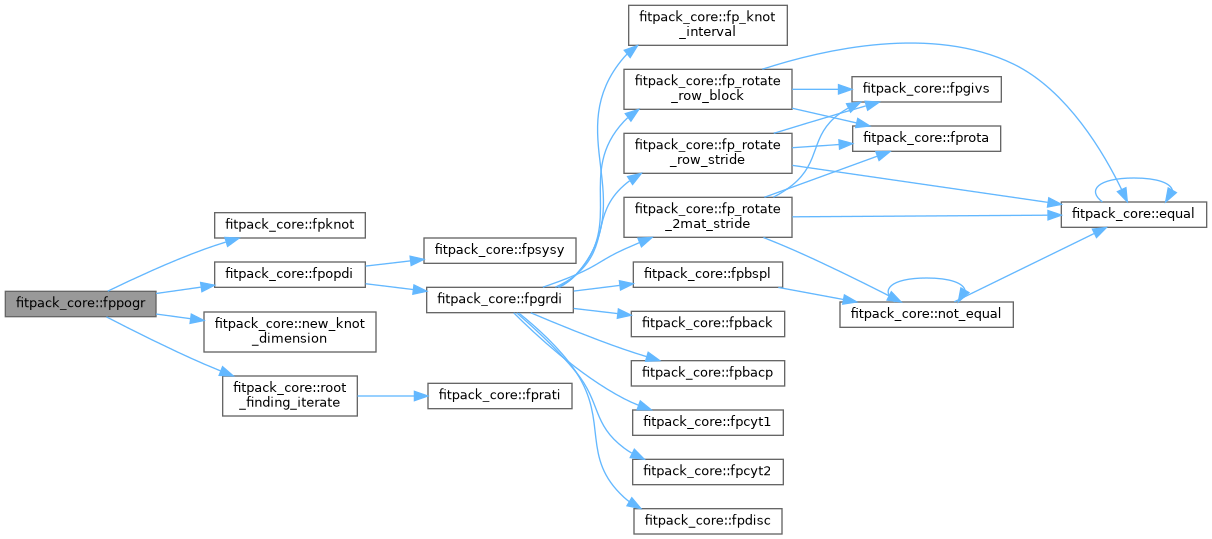
◆ fppola()
|
private |
Core algorithm for spline fitting on a polar domain.
Fits a smooth bivariate spline to data on a polar-like domain \( D = \{(x,y) : x^2 + y^2 \leq r(\theta)^2\} \) by transforming to coordinates \( (u, v) \) where \( u = r/r(\theta) \) (radial) and \( v = \theta \) (angular). The boundary function \( r(\theta) \) is user-supplied.
Continuity at the origin ( \( u = 0 \)) imposes constraints on the B-spline coefficients (Eq. 11.3-11.5):
- \( s(0, v) \) must be independent of \( v \)
- Derivatives at the origin must satisfy symmetry conditions
The algorithm uses the same iterative scheme as fpsurf (knot placement, QR factorization with rank-deficiency handling, smoothing search) with additional logic for origin-continuity constraints and the periodic \( v \)-direction.
- Parameters
-
[in] iopt1 Fitting option (0 = new, 1 = continue) [in] iopt2 Origin BC option (0 = free, 1 = given) [in] iopt3 Derivative BC option at origin [in] m Number of data points [in] u Radial coordinates, length m[in] v Angular coordinates, length m[in] z Data values, length m[in] w Data weights, length m[in] rad Boundary function values at data angles [in] s Smoothing factor \( S \geq 0 \) [in] nuest Max radial knots [in] nvest Max angular knots [in] eta Rank-deficiency tolerance factor [in] tol Smoothing condition tolerance [in] maxit Maximum smoothing-parameter iterations [in] ib1 Bandwidth parameter [in] ib3 Extended bandwidth parameter [in] nc Length of coefficient array [in] ncc Auxiliary coefficient dimension [in] intest Length of fpint[in] nrest Length of index[in,out] nu Number of radial knots [in,out] tu Radial knot vector [in,out] nv Number of angular knots [in,out] tv Angular knot vector [in,out] c B-spline coefficients [in,out] fp Weighted sum of squared residuals [in,out] sup Upper bound for residual [in,out] fpint Work: residual sums per panel [in,out] coord Work: coordinates [in,out] f Work: RHS vector [in,out] ff Work: RHS copy [in,out] row Work: observation row [in,out] cs Work: cosine values [in,out] cosi Work: cosine integrals [in,out] a Work: band matrix [in,out] q Work: extended band matrix [in,out] bu Work: radial discontinuity coefficients [in,out] bv Work: angular discontinuity coefficients [in,out] spu Work: radial B-spline values [in,out] spv Work: angular B-spline values [in,out] h Work vector [in,out] index Work: panel sorting indices [in,out] nummer Work: data-to-panel mapping [in,out] wrk Work array [in] lwrk Length of wrk[in,out] ier Error flag
- See also
- Dierckx, Ch. 11, §11.1 (pp. 197-205), Eq. 11.1-11.9
- fprppo — polar representation; fpopdi — polar derivatives
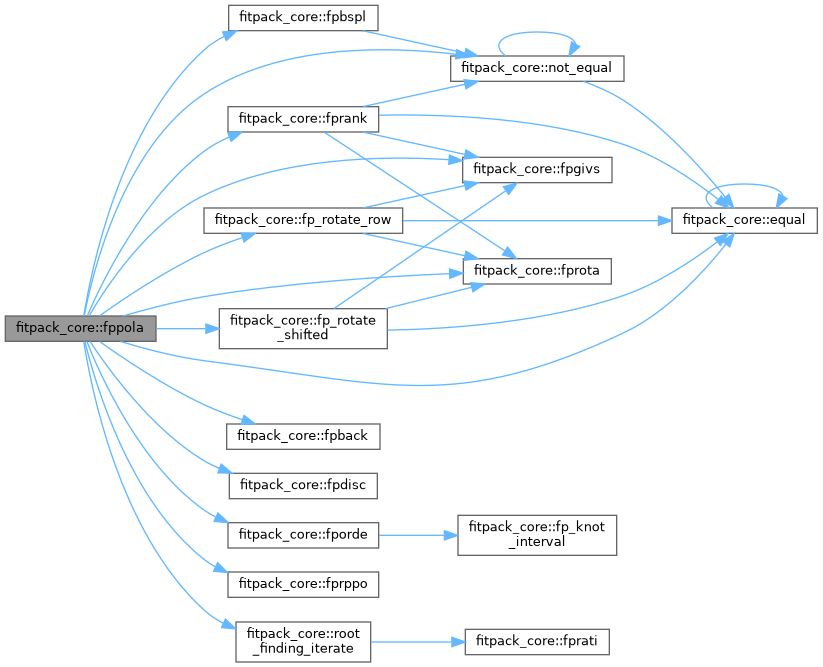
◆ fprank()
|
private |
Compute the minimum-norm least-squares solution under rank deficiency.
When the QR-triangularized observation matrix \( R \) has rank \( r < n \) (detected by near-zero diagonal elements \( |R_{ii}| < \varepsilon \)), the least-squares solution is not unique. This routine computes the minimum-norm B-spline coefficient vector \( \tilde{c} \) by factoring the reduced upper trapezoidal matrix \( W = [W_1 \ W_2] \) (Eq. 9.9):
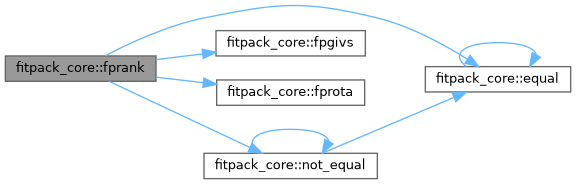
◆ fprati()
|
private |
Rational interpolation for the smoothing parameter search.
Given three points \( (p_1, F_1) \), \( (p_2, F_2) \), \( (p_3, F_3) \) on the curve \( F(p) \), computes the zero of the rational interpolant:
\[ R(p) = \frac{u \, p + v}{p + w} \tag{5.30} \]
that passes through the three points. The zero \( \tilde{p} \) gives the next estimate of the smoothing parameter \( p \) satisfying \( F(p) = S \) during the iterative knot-placement strategy.
When \( p_3 = \infty \) (indicated by p3 <= 0), the formula simplifies to:
\[ \tilde{p} = \frac{p_1 (F_1 - F_3)(F_2 - S) - p_2 (F_2 - F_3)(F_1 - S)} {(F_1 - F_2)(F_3 - S)} \tag{5.31} \]
On exit, \( (p_1, F_1) \) and \( (p_3, F_3) \) are updated to bracket the root: \( F_1 > 0 \) and \( F_3 < 0 \).
- Parameters
-
[in,out] p1 First abscissa; updated to maintain \( F_1 > 0 \) [in,out] f1 First ordinate; updated with \( p_1 \) [in] p2 Second abscissa (most recent iterate) [in] f2 Second ordinate \( F(p_2) - S \) [in,out] p3 Third abscissa; \( p_3 \leq 0 \) means \( p_3 = \infty \). Updated to maintain \( F_3 < 0 \). [in,out] f3 Third ordinate; updated with \( p_3 \) [out] p The new estimate \( \tilde{p} \)
- See also
- Dierckx, Ch. 5, §5.2.4 (pp. 83-86), Eq. 5.30-5.32
◆ fpregr()
|
private |
Knot determination + p-iteration for dims-dimensional gridded fits.
Outer iteration loop for fitting a smoothing spline surface on a rectangular grid \( \{x_i\} \times \{y_j\} \). Manages the knot selection strategy (alternating between axis directions based on residuals) and the smoothing-parameter search, delegating the grid computation to fpgrre at each step. At dims=2 this is bit-for-bit identical to fpregr: the paired per-axis state becomes dims-length arrays and the knot-init / knot-placement passes become runtime do-loops over the axes, while the binary knot-direction arbiter and the scalar p-iteration root find for f(p)=s are kept literal-2 until the dims>2 step.
WORKSPACE: per the no-allocation rule, all scratch (sp,a,b,right,q,fpint,nr, nrdat) is supplied by the caller (regrid carves it from the user wrk/iwrk) and received here as assumed-shape inout views; the persistent fit-state (fp0,fpold,reduc,lastdi,nplus) is passed explicitly rather than hidden in wrk offsets.
- Parameters
-
[in] iopt 0 = new fit, 1 = continue [in] dims Number of axes (domain dimension) [in] xg Per-axis grid values; column \( d \) is xg(1:m(d),d)[in] m Number of grid points per axis, m(dims)[in] z Data values, flat row-major z(*)(passed through to fpgrre)[in] lo Per-axis lower boundary (orig xb,yb) [in] hi Per-axis upper boundary (orig xe,ye) [in] k Degree per axis, k(dims)[in] s Smoothing factor \( S \geq 0 \) [in] nest Max knots per axis (orig nxest,nyest) [in] tol Smoothing condition tolerance [in] maxit Maximum smoothing-parameter iterations [in] nc Length of coefficient array [in,out] n Number of knots per axis (orig nx,ny) [in,out] t Per-axis knot vectors; column \( d \) is t(1:n(d),d)(orig tx,ty)[in,out] c B-spline coefficients, length nc[in,out] fp Weighted sum of squared residuals [in,out] fp0 Initial residual [in,out] fpold Previous residual [in,out] reduc Per-axis residual reduction (orig reducx,reducy) [in,out] lastdi Last direction of knot addition [in,out] nplus Per-axis number of knots to add (orig nplusx,nplusy) [in,out] fpint Residual sums per knot interval, per axis (orig fpintx,fpinty) [in,out] nr Per-axis knot interval indices (orig nrx,nry) [in,out] nrdat Per-axis interior data counts per interval (orig nrdatx,nrdaty) [in,out] sp Work: per-axis observation matrices [in,out] right Work: RHS vector [in,out] q Work: RHS matrix [in,out] a Work: per-axis band matrices [in,out] b Work: per-axis discontinuity matrices [in,out] ier Error flag
- See also
- fpregr, fpgrre, Dierckx Ch. 10 §10.2 (pp. 170-172) Eq. 10.4-10.8; todo/fitpack_nd_grids.md (slice 1, §8 part C)
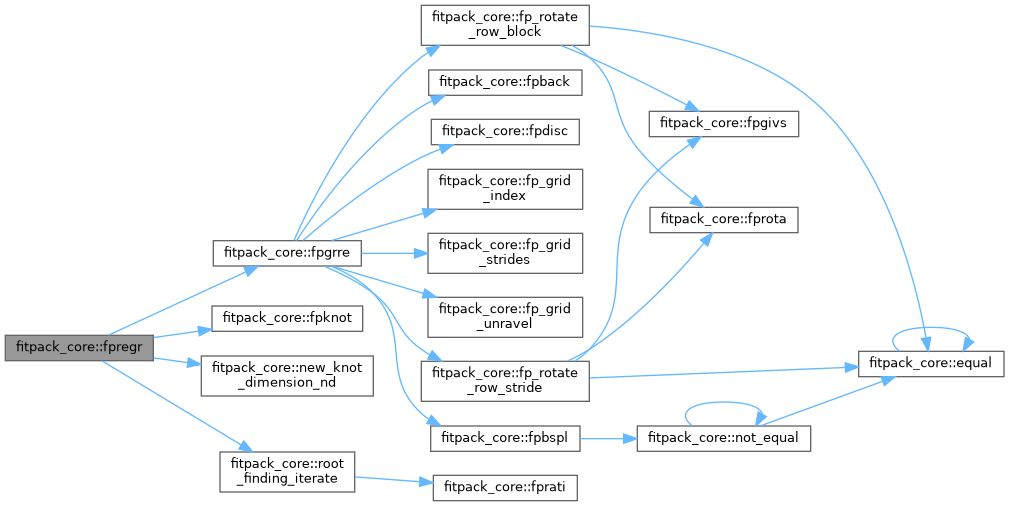
◆ fprota()
|
private |
Apply a Givens plane rotation to two scalars.
Given the cosine \( c \) and sine \( s \) of a Givens rotation (as computed by fpgivs), transforms a pair of values \( (a, b) \):
\[ a' = c \, a - s \, b, \qquad b' = s \, a + c \, b \tag{4.15} \]
This is used to propagate each Givens rotation through the remaining columns of the observation matrix and the right-hand side vector during QR factorization.
- Parameters
-
[in] cos Cosine of the rotation angle [in] sin Sine of the rotation angle [in,out] a First element; replaced by \( c \, a - s \, b \) [in,out] b Second element; replaced by \( s \, a + c \, b \)
- See also
- Dierckx, Ch. 4, §4.1.2 (pp. 55-58), Eq. 4.15
◆ fprppo()
|
private |
Convert constrained polar spline coefficients to standard form.
Transforms the coefficients of a constrained bicubic spline (as computed by fppola with origin-continuity constraints) into the standard B-spline coefficient representation. The constrained form encodes the origin conditions via cosine-weighted combinations; this routine expands them into independent coefficients.
- Parameters
-
[in] nu Number of radial knots [in] nv Number of angular knots [in] if1 Origin constraint type (position) [in] if2 Origin constraint type (derivative) [in] cosi Cosine integral values [in] ratio Knot ratio for origin constraint [in,out] c Constrained coefficients on entry; work on exit [in,out] f Standard B-spline coefficients on exit [in] ncoff Number of coefficients
◆ fprpsp()
|
private |
Convert constrained spherical spline coefficients to standard form.
Transforms the coefficients of a constrained bicubic spline (as computed by fpsphe with pole-continuity constraints) into the standard B-spline coefficient representation. The constrained form encodes pole conditions via cosine/sine-weighted combinations at \( \theta = 0 \) and \( \theta = \pi \).
- Parameters
-
[in] nt Number of \( \theta \)-knots [in] np Number of \( \phi \)-knots [in] co Cosine values for pole constraints [in] si Sine values for pole constraints [in,out] c Constrained coefficients on entry; work on exit [in,out] f Standard B-spline coefficients on exit [in] ncoff Number of coefficients
◆ fpseno()
|
private |
Fetch and advance to the next branch in the constraint-set tree.
Extracts the constraint indices of the branch ending at terminal node merk (length nbind) into the array ibind(1:nbind). Then advances merk to point to the next branch of the same length, or sets merk = 1 if no further branch exists.
Used by the Theil-Van de Panne procedure (§7.2) to enumerate candidate active-constraint sets level by level.
- Parameters
-
[in] maxtr Size of the tree arrays [in] up Parent pointers [in] left Left-child pointers [in] right Right-child pointers [in] info Constraint index stored at each node [in,out] merk On entry, terminal node of the branch to fetch. On exit, terminal node of the next branch of length nbind, or 1 if none.[out] ibind Constraint indices of the fetched branch, length nbind[in] nbind Required branch length
◆ fpspgr()
|
private |
Driver for spherical grid smoothing spline with knot selection.
Outer iteration loop for fitting a smoothing spline on a spherical grid. Manages knot selection in \( \theta \) and \( \phi \) directions and the smoothing-parameter search, delegating grid computation to fpopsp. Handles pole constraints at both \( \theta = 0 \) and \( \theta = \pi \).
- Parameters
-
[in] iopt Fitting options [in] ider Derivative specification flags [in] u Co-latitude grid \( \theta \), length mu[in] mu Number of \( \theta \)-points [in] v Longitude grid \( \phi \), length mv[in] mv Number of \( \phi \)-points [in] r Data values, length mr[in] mr Length of r[in] r0 North-pole value [in] r1 South-pole value [in] s Smoothing factor \( S \geq 0 \) [in] nuest Max \( \theta \)-knots [in] nvest Max \( \phi \)-knots [in] tol Smoothing condition tolerance [in] maxit Maximum smoothing-parameter iterations [in] nc Length of coefficient array [in,out] nu Number of \( \theta \)-knots [in,out] tu \( \theta \)-knot vector [in,out] nv Number of \( \phi \)-knots [in,out] tv \( \phi \)-knot vector [in,out] c B-spline coefficients [in,out] fp Weighted sum of squared residuals [in,out] fp0 Initial residual [in,out] fpold Previous residual [in,out] reducu Residual reduction in \( \theta \) [in,out] reducv Residual reduction in \( \phi \) [in,out] fpintu Residual sums per \( \theta \)-interval [in,out] fpintv Residual sums per \( \phi \)-interval [in,out] dr Pole derivative parameters [in] step Search step for pole parameter optimization [in,out] lastdi Last direction of knot addition [in,out] nplusu Number of \( \theta \)-knots to add [in,out] nplusv Number of \( \phi \)-knots to add [in,out] lastu0 Last north-pole knot change flag [in,out] lastu1 Last south-pole knot change flag [in,out] nru \( \theta \)-knot interval indices [in,out] nrv \( \phi \)-knot interval indices [in,out] nrdatu Interior data counts per \( \theta \)-interval [in,out] nrdatv Interior data counts per \( \phi \)-interval [in,out] wrk Work array [in] lwrk Length of wrk[in,out] ier Error flag
- See also
- Dierckx, Ch. 11, §11.2 (pp. 205-213)
- fpopsp — grid computation; fpsphe — scattered spherical fitting
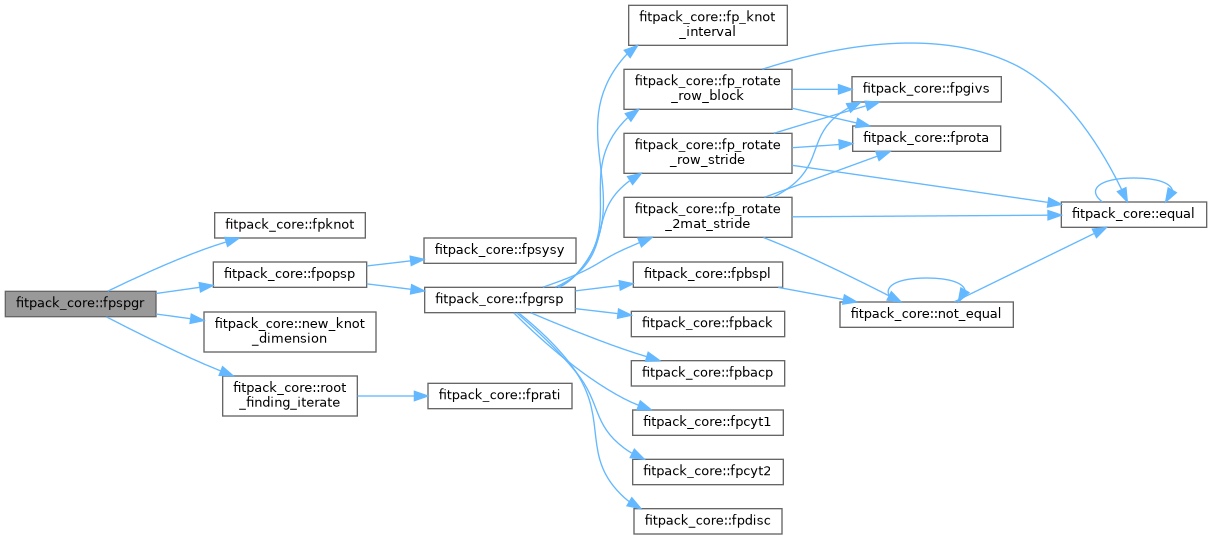
◆ fpsphe()
|
private |
Core algorithm for spline fitting on the sphere.
Fits a smooth bivariate spline to data on the unit sphere using coordinates \( (\theta, \phi) \) where \( \theta \in [0, \pi] \) is co-latitude and \( \phi \in [0, 2\pi) \) is longitude. The spline is periodic in \( \phi \) and must satisfy pole-continuity conditions at \( \theta = 0 \) and \( \theta = \pi \) (Eq. 11.12):
\[ s(0, \phi) = \text{const}, \quad s(\pi, \phi) = \text{const} \tag{11.12} \]
with derivative conditions analogous to the polar case (Eq. 11.14-11.16). The algorithm follows the same iterative framework as fpsurf with additional handling for pole constraints and the periodic \( \phi \)-direction.
- Parameters
-
[in] iopt 0 = new fit, 1 = continue [in] m Number of data points [in] teta Co-latitude values \( \theta \), length m[in] phi Longitude values \( \phi \), length m[in] r Data values, length m[in] w Data weights, length m[in] s Smoothing factor \( S \geq 0 \) [in] ntest Max \( \theta \)-knots [in] npest Max \( \phi \)-knots [in] eta Rank-deficiency tolerance factor [in] tol Smoothing condition tolerance [in] maxit Maximum smoothing-parameter iterations [in] ib1 Bandwidth parameter [in] ib3 Extended bandwidth parameter [in] nc Length of coefficient array [in] ncc Auxiliary coefficient dimension [in] intest Length of fpint[in] nrest Length of index[in,out] nt Number of \( \theta \)-knots [in,out] tt \( \theta \)-knot vector [in,out] np Number of \( \phi \)-knots [in,out] tp \( \phi \)-knot vector [in,out] c B-spline coefficients [in,out] fp Weighted sum of squared residuals [in,out] sup Upper bound for residual [in,out] fpint Work: residual sums per panel [in,out] coord Work: coordinates [in,out] f Work: RHS vector [in,out] ff Work: RHS copy [in,out] row Work: observation row [in,out] coco Work: cosine values for pole constraints [in,out] cosi Work: cosine integrals for pole constraints [in,out] a Work: band matrix [in,out] q Work: extended band matrix [in,out] bt Work: \( \theta \)-discontinuity coefficients [in,out] bp Work: \( \phi \)-discontinuity coefficients [in,out] spt Work: \( \theta \)-B-spline values [in,out] spp Work: \( \phi \)-B-spline values [in,out] h Work vector [in,out] index Work: panel sorting indices [in,out] nummer Work: data-to-panel mapping [in,out] wrk Work array [in] lwrk Length of wrk[out] ier Error flag
- See also
- Dierckx, Ch. 11, §11.2 (pp. 205-213), Eq. 11.12-11.16
- fprpsp — spherical representation; fpopsp — spherical operations
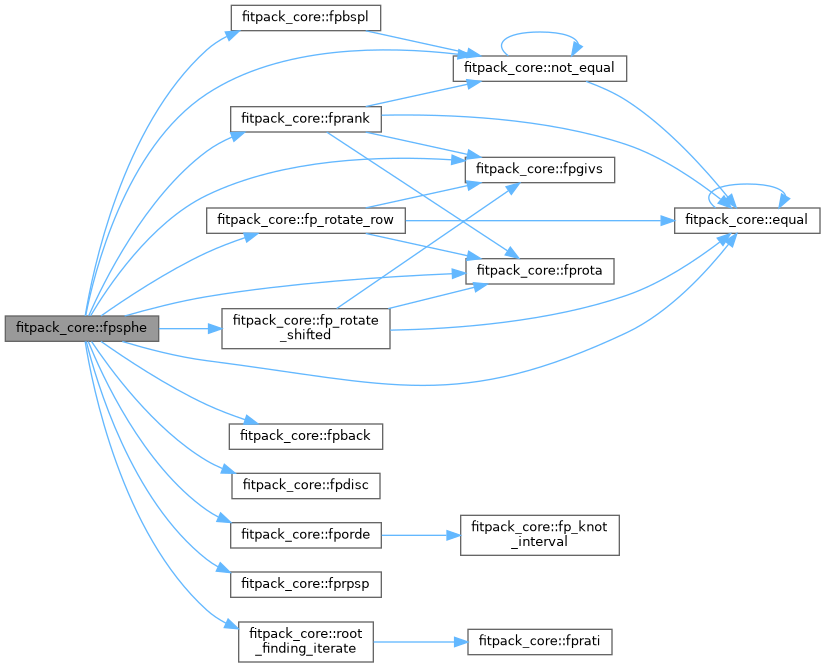
◆ fpsuev()
|
private |
Evaluate a parametric bicubic tensor-product spline surface.
Computes the values of a \( d \)-dimensional bicubic spline surface \( (s_1(u,v), \ldots, s_d(u,v)) \) at the grid points \( (u_i, v_j) \), \( i = 1, \ldots, m_u \), \( j = 1, \ldots, m_v \).
For each dimension, the evaluation uses the tensor-product decomposition:
\[ s(u, v) = \sum_{i} \left( \sum_{j} c_{i,j} \, M_{j,4}(v) \right) N_{i,4}(u) \]
This is the computational core called by surev after input validation.
- Parameters
-
[in] idim Number of coordinate dimensions [in] tu Knot vector in \( u \), length nu[in] nu Number of knots in \( u \) [in] tv Knot vector in \( v \), length nv[in] nv Number of knots in \( v \) [in] c B-spline coefficients, length (nu-4)*(nv-4)*idim[in] u Evaluation points in \( u \), length mu[in] mu Number of evaluation points in \( u \) [in] v Evaluation points in \( v \), length mv[in] mv Number of evaluation points in \( v \) [out] f Surface values, length mu * mv * idim[out] wu B-spline basis values in \( u \), wu(mu, 4)[out] wv B-spline basis values in \( v \), wv(mv, 4)[out] lu Knot interval indices in \( u \), length mu[out] lv Knot interval indices in \( v \), length mv
- See also
- Dierckx, Ch. 2, §2.1.2 (pp. 28-30), Eq. 2.14-2.17

◆ fpsurf()
|
private |
Core algorithm for bivariate tensor-product spline surface fitting.
Fits a tensor-product spline surface \( s(x,y) \) of degrees \( k_x \) and \( k_y \) to scattered data by minimizing:
\[ \sum_{i=1}^{m} \bigl( w_i (z_i - s(x_i, y_i)) \bigr)^2 \leq S \tag{9.2} \]
The B-spline representation has \( (g+k_x+1)(h+k_y+1) \) coefficients on the knot grid \( \{t_x\} \times \{t_y\} \). The algorithm iterates:
- Knot placement in \( x \) and \( y \) based on residuals
- QR factorization of the observation matrix via Givens rotations, with rank-deficiency handling via fprank (Eq. 9.7-9.10)
- Smoothing-parameter search via rational interpolation
Data points are sorted into knot-interval panels using fporde for efficient row-by-row processing.
- Parameters
-
[in] iopt 0 = new fit, 1 = continue [in] m Number of data points [in,out] x Data \( x \)-coordinates, length m[in,out] y Data \( y \)-coordinates, length m[in] z Data values, length m[in] w Data weights, length m[in] xb Left \( x \)-boundary [in] xe Right \( x \)-boundary [in] yb Lower \( y \)-boundary [in] ye Upper \( y \)-boundary [in] kxx Degree in \( x \) [in] kyy Degree in \( y \) [in] s Smoothing factor \( S \geq 0 \) [in] nxest Max knots in \( x \) [in] nyest Max knots in \( y \) [in] eta Rank-deficiency tolerance factor [in] tol Smoothing condition tolerance [in] maxit Maximum smoothing-parameter iterations [in] nmax Max of nxest,nyest[in] km1 \( \max(k_x, k_y) + 1 \) [in] km2 \( k_x + k_y + 2 \) [in] ib1 \( k_x k_y + 2 \) [in] ib3 \( k_x k_y + \max(k_x, k_y) + 2 \) [in] nc Length of coefficient array [in] intest Length of fpint[in] nrest Length of index[in,out] nx0 Number of \( x \)-knots [in,out] tx \( x \)-knot vector [in,out] ny0 Number of \( y \)-knots [in,out] ty \( y \)-knot vector [in,out] c B-spline coefficients [in,out] fp Weighted sum of squared residuals [in,out] fp0 Initial unweighted residual sum [in,out] fpint Work: residual sums per panel [in,out] coord Work: coordinates [in,out] f Work: RHS vector [in,out] ff Work: RHS copy [in,out] a Work: band matrix [in,out] q Work: extended band matrix [in,out] bx Work: \( x \)-discontinuity coefficients [in,out] by Work: \( y \)-discontinuity coefficients [in,out] spx Work: \( x \)-B-spline values [in,out] spy Work: \( y \)-B-spline values [in,out] h Work vector [in,out] index Work: panel sorting indices [in,out] nummer Work: data-to-panel mapping [in,out] wrk Work array [in] lwrk Length of wrk[in,out] ier Error flag
- See also
- Dierckx, Ch. 9, §9.1-9.2 (pp. 147-167), Eq. 9.2-9.10
- fporde — panel sorting; fprank — rank-deficient solver
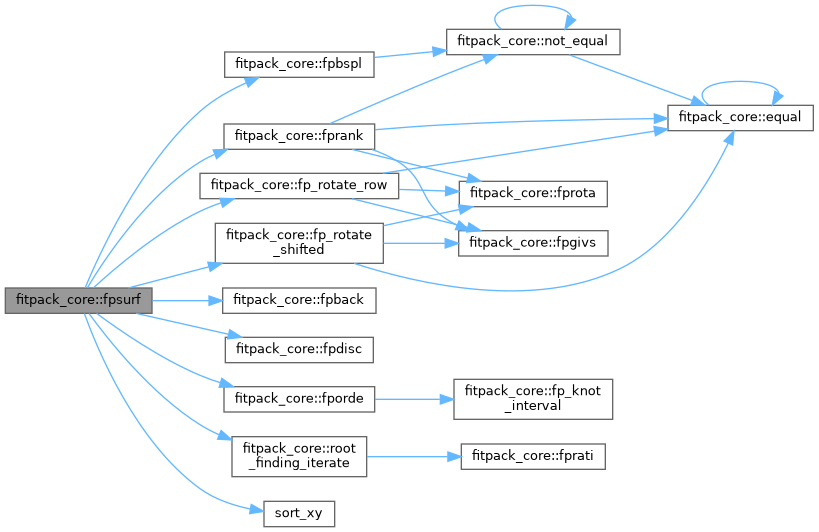
◆ fpsysy()
|
private |
Solve a small symmetric linear system by Cholesky factorization.
Solves the \( n \times n \) symmetric positive definite system \( A \, b = g \) with \( n \leq 6 \) using Cholesky decomposition. On exit, g contains the solution \( b \).
Used by fpopdi and fpopsp for the small optimization problems that determine the optimal origin/pole boundary parameters.
- Parameters
-
[in,out] a Symmetric matrix, dimension (6, 6). Only the firstnrows and columns are used.[in] n System dimension ( \( n \leq 6 \)) [in,out] g On entry, right-hand side. On exit, solution.
◆ fptrnp()
|
private |
Triangularize the tensor-product system for non-periodic grids.
Reduces the \( (m + n - 7) \times (n - 4) \) augmented observation matrix to upper triangular form using Givens rotations (Eq. 10.8), simultaneously transforming the \( m \times mm \times d \) data matrix \( Z \) into the \( (n-4) \times mm \times d \) RHS matrix \( Q \). Used in the second phase of the Kronecker product decomposition for parametric grid surfaces (fppasu via fpgrpa).
- Parameters
-
[in] m Number of grid points in this direction [in] mm Number of columns in the RHS (other direction size) [in] idim Number of surface dimensions \( d \) [in] n Number of knots in this direction [in] nr Knot interval indices, length m[in] sp B-spline values at grid points, (m, 4)[in] p Smoothing parameter [in] b Discontinuity jump matrix, (n, 5)[in] z Data matrix, length \( m \cdot mm \cdot d \) [out] a Triangularized band matrix, (n, 5)[out] q Transformed RHS, length \( (n-4) \cdot mm \cdot d \) [out] right Work: RHS row vector, length \( mm \cdot d \)
- See also
- Dierckx, Ch. 10, §10.2 (pp. 170-172), Eq. 10.8
- fptrpe — periodic variant; fp_rotate_row_stride — stride rotation
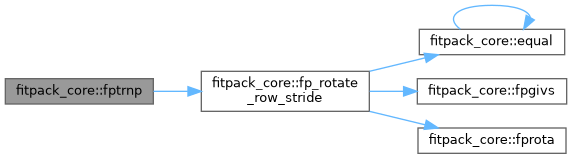
◆ fptrpe()
|
private |
Triangularize the tensor-product system for periodic grids.
Periodic variant of fptrnp. Reduces the \( (m + n - 7) \times (n - 7) \) cyclic band matrix to upper triangular form using two-matrix Givens rotations (fp_rotate_2mat_stride), simultaneously transforming the data matrix \( Z \) into the RHS matrix \( Q \). The periodicity wraps the last columns into the first, creating the block-triangular structure stored in a (main) and aa (periodic block).
- Parameters
-
[in] m Number of grid points in this direction [in] mm Number of columns in the RHS [in] idim Number of surface dimensions \( d \) [in] n Number of knots in this direction [in] nr Knot interval indices, length m[in] sp B-spline values at grid points, (m, 4)[in] p Smoothing parameter [in] b Discontinuity jump matrix, (n, 5)[in] z Data matrix, length \( m \cdot mm \cdot d \) [out] a Triangularized band matrix (main block), (n, 5)[out] aa Triangularized periodic block, (n, 4)[out] q Transformed RHS, length \( (n-7) \cdot mm \cdot d \) [out] right Work: RHS row vector, length \( mm \cdot d \)
- See also
- Dierckx, Ch. 10, §10.2 (pp. 170-172), Eq. 10.8 (periodic)
- fptrnp — non-periodic variant; fp_rotate_2mat_stride — periodic rotation
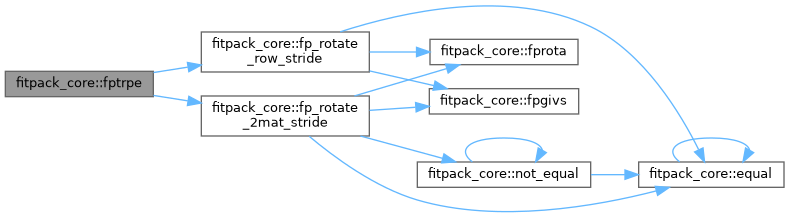
◆ get_smoothing()
| subroutine, public fitpack_core::get_smoothing | ( | real(fp_real), intent(in) | old_smoothing, |
| real(fp_real), intent(in), optional | user_smoothing, | ||
| integer(fp_size), intent(out) | nit, | ||
| real(fp_real), dimension(3), intent(out) | smooth_now ) |
Choose the smoothing parameter(s) for an iterative fit.
Selects one or more values of the smoothing factor \( s \) for the next fitting iteration(s). If a user-supplied value is present it is used directly; if a previous value exists it is re-used; otherwise a default decreasing trajectory is applied.
- Parameters
-
[in] old_smoothing Previous smoothing factor. [in] user_smoothing Optional user-supplied value. [out] nit Number of smoothing iterations to perform. [out] smooth_now Array of 3 smoothing values for the iterations.
◆ insert()
| pure subroutine, public fitpack_core::insert | ( | integer(fp_size), intent(in) | iopt, |
| real(fp_real), dimension(nest), intent(in) | t, | ||
| integer(fp_size), intent(in) | n, | ||
| real(fp_real), dimension(nest), intent(in) | c, | ||
| integer(fp_size), intent(in) | k, | ||
| real(fp_real), intent(in) | x, | ||
| real(fp_real), dimension(nest), intent(out) | tt, | ||
| integer(fp_size), intent(out) | nn, | ||
| real(fp_real), dimension(nest), intent(out) | cc, | ||
| integer(fp_size), intent(in) | nest, | ||
| integer(fp_flag), intent(out) | ier ) |
Insert a single knot into a spline, returning a new B-spline representation.
Inserts the knot \( x \) into the B-spline representation of \( s(x) \) using the Boehm knot insertion algorithm. The spline itself is unchanged; only its representation (knots and coefficients) is updated.
Can be called with output arrays aliased to input arrays to replace the representation in place: call insert(iopt,t,n,c,k,x,t,n,c,nest,ier).
- Parameters
-
[in] iopt Periodicity flag: 0= non-periodic;/=0= periodic spline.[in] t Input knot positions (length nest).[in] n Number of knots before insertion. [in] c Input B-spline coefficients (length nest).[in] k Degree of the spline. [in] x Location of the knot to insert. Must satisfy \( t_{k+1} \le x \le t_{n-k} \). [out] tt Output knot positions (length nest).[out] nn Number of knots after insertion ( \( n + 1 \)). [out] cc Output B-spline coefficients (length nest).[in] nest Array dimension. Must satisfy nest > n.[out] ier Error flag: 0= normal return;10= invalid input.
- See also
- Dierckx, Ch. 1, §1.3.4 (pp. 13–14), Eq. 1.46–1.48; fpinst — knot insertion kernel
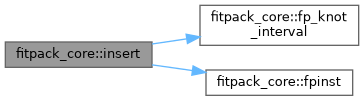
◆ insert_inplace()
| pure subroutine, public fitpack_core::insert_inplace | ( | integer(fp_size), intent(in) | iopt, |
| real(fp_real), dimension(nest), intent(inout) | t, | ||
| integer(fp_size), intent(inout) | n, | ||
| real(fp_real), dimension(nest), intent(inout) | c, | ||
| integer(fp_size), intent(in) | k, | ||
| real(fp_real), intent(in) | x, | ||
| integer(fp_size), intent(in) | nest, | ||
| integer(fp_flag), intent(out) | ier ) |
Insert a single knot into a spline in place (avoiding aliasing issues).
Wrapper around insert that uses temporary arrays to safely update the knot and coefficient arrays in place, avoiding the aliasing of input/output arguments present in the original Fortran 77 calling convention.
- Parameters
-
[in] iopt Periodicity flag: 0= non-periodic;/=0= periodic.[in,out] t Knot positions (length nest). Updated on exit.[in,out] n Number of knots. Updated to \( n + 1 \) on exit. [in,out] c B-spline coefficients (length nest). Updated on exit.[in] k Degree of the spline. [in] x Location of the knot to insert. [in] nest Array dimension. Must satisfy nest > n.[out] ier Error flag: 0= normal return;10= invalid input.
- See also
- insert — non-aliased variant

◆ iopt_message()
| pure character(len=:) function, allocatable, public fitpack_core::iopt_message | ( | integer(fp_flag), intent(in) | iopt | ) |
Convert an iopt computation-mode flag to a human-readable string.
- Parameters
-
[in] iopt Computation mode flag ( -1= Least-Squares,0= Smoothing,1= Old).
- Returns
- Allocatable character string describing the mode.
◆ is_after()
|
private |
Test \( a > b \) (strict greater-than).
◆ is_before()
|
private |
Test \( a < b \) (strict less-than).
◆ is_ge()
|
private |
Test \( a \ge b \).
◆ is_le()
|
private |
Test \( a \le b \).
◆ ndspeu()
| pure subroutine, public fitpack_core::ndspeu | ( | integer(fp_dim), intent(in) | dims, |
| real(fp_real), dimension(:,:), intent(in) | t, | ||
| integer(fp_size), dimension(dims), intent(in) | n, | ||
| real(fp_real), dimension(:), intent(in) | c, | ||
| integer(fp_size), dimension(dims), intent(in) | k, | ||
| real(fp_real), dimension(1,dims,*), intent(in) | xg, | ||
| integer(fp_size), intent(in) | m, | ||
| real(fp_real), dimension(m), intent(out) | z, | ||
| integer(fp_flag), intent(out) | ier ) |
Evaluate a tensor-product spline at scattered points (any dimension).
Scattered-point counterpart of ndspev (which evaluates on a rectangular grid). A scattered point is just a degenerate 1x...x1 grid, so each point is handed to the fpndsp kernel with a singleton per-axis grid (one call per point). This keeps a single source of truth for the tensor contraction (fpndsp); at dims=2 it reduces to the classic bivariate scattered evaluation. Self-manages its (singleton) basis scratch, so no work arrays are required.
- Parameters
-
[in] dims Number of axes (domain dimension) [in] t Per-axis knot vectors; column \( d \) is t(1:n(d),d)[in] n Number of knots per axis, n(dims)[in] c B-spline coefficient tensor, flat row-major (first axis varies slowest) [in] k Spline degree per axis, k(dims)[in] xg Point coordinates, xg(d,i)= axis- \( d \) coordinate of point \( i \), passed column-major (point \( i \) = contiguous column, matching curev/parcur). Declared with a leading singleton node,xg(1,dims,*), so the slicexg(:,:,i)is already the(1,dims)grid fpndsp reads; callers pass a plain contiguous(dims,m)array.[in] m Number of evaluation points, \( m \ge 1 \) [out] z Spline values at the points, z(m)[out] ier FITPACK_OK on success, FITPACK_INPUT_ERROR on bad input
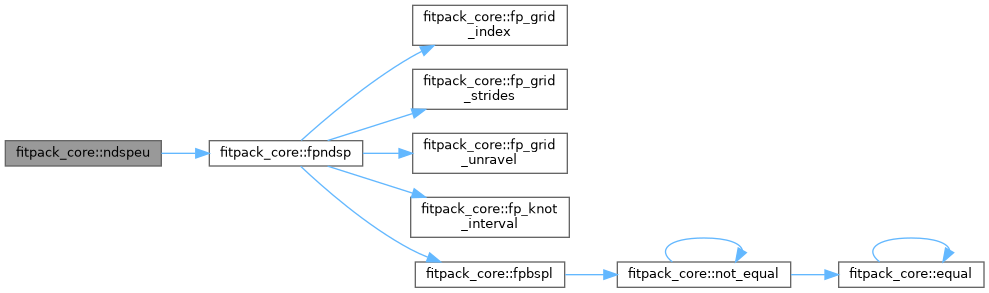
◆ ndspev()
| pure subroutine, public fitpack_core::ndspev | ( | integer(fp_dim), intent(in) | dims, |
| real(fp_real), dimension(:,:), intent(in) | t, | ||
| integer(fp_size), dimension(dims), intent(in) | n, | ||
| real(fp_real), dimension(:), intent(in) | c, | ||
| integer(fp_size), dimension(dims), intent(in) | k, | ||
| real(fp_real), dimension(:,:), intent(in) | xg, | ||
| integer(fp_size), dimension(dims), intent(in) | m, | ||
| real(fp_real), dimension(:), intent(out) | z, | ||
| real(fp_real), dimension(lwrk), intent(inout), target | wrk, | ||
| integer(fp_size), intent(in) | lwrk, | ||
| integer(fp_size), dimension(kwrk), intent(inout), target | iwrk, | ||
| integer(fp_size), intent(in) | kwrk, | ||
| integer(fp_flag), intent(out) | ier ) |
N-D generalization of bispev: evaluate a tensor-product spline on a grid.
Public flat-workspace front-end to fpndsp (the evaluation kernel). Mirrors bispev: the caller supplies flat real wrk(lwrk) / integer iwrk(kwrk) scratch, which are carved by pointer bounds remapping into the padded per-axis basis table w(maxk1,maxm,dims) and the interval-index matrix lidx(maxm,dims) that fpndsp expects (maxm=maxval(m), maxk1=maxval(k)+1). At dims=2 this is bit-for-bit identical to bispev.
Minimum workspace: lwrk >= maxval(m)*(maxval(k)+1)*dims, kwrk >= maxval(m)*dims.
- Parameters
-
[in] dims Number of axes (domain dimension) [in] t Per-axis knot vectors; column \( d \) is t(1:n(d),d)[in] n Number of knots per axis, n(dims)[in] c B-spline coefficient tensor, flat row-major (first axis varies slowest) [in] k Spline degree per axis, k(dims)[in] xg Per-axis evaluation grids; column \( d \) is xg(1:m(d),d)[in] m Number of evaluation points per axis, m(dims)[out] z Spline values at grid points, flat row-major (first axis varies slowest) wrk Real workspace, wrk(lwrk)(target; carved into the basis table)[in] lwrk Size of wrkiwrk Integer workspace, iwrk(kwrk)(target; carved into the interval indices)[in] kwrk Size of iwrk[out] ier FITPACK_OK on success, FITPACK_INPUT_ERROR on bad input/workspace
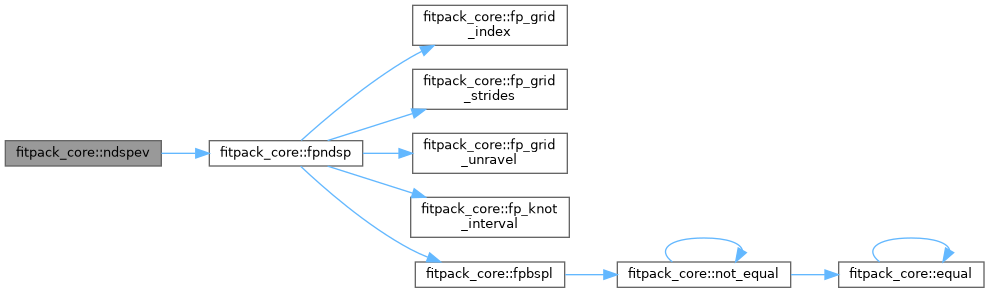
◆ new_knot_dimension()
|
private |
Choose which dimension receives the next knot during bivariate fitting.
Selects whether to add a knot in dimension 1 or 2, balancing knot insertion across dimensions. Prefers dimension 2 when it has fewer added knots, unless dimension 1 is at its maximum or no knot has been added yet.
- Parameters
-
[in] n1 Current number of knots in dimension 1 [in] n1add Number of knots added to dimension 1 this iteration [in] n1max Maximum allowed knots in dimension 1 [in] n2 Current number of knots in dimension 2 [in] n2add Number of knots added to dimension 2 this iteration [in] n2max Maximum allowed knots in dimension 2 [in] last Last dimension a knot was added to ( KNOT_DIM_1,KNOT_DIM_2, orKNOT_DIM_NONE)
- Returns
KNOT_DIM_1orKNOT_DIM_2
◆ new_knot_dimension_nd()
|
private |
Choose which axis gets the next knots (N-D form of new_knot_dimension).
Among the uncapped axes (n(d)<ne(d)) picks the one with the smallest pending knot count npl(d); ties resolve to the highest axis index. At dims=2 this is bit-for-bit identical to new_knot_dimension. The caller guarantees at least one uncapped axis, so dir ends in 1..dims.
- Parameters
-
[in] dims Number of axes [in] n Current knot count per axis [in] npl Pending knots to add per axis this iteration [in] ne Knot cap per axis (min(nmax,nest))
- Returns
- Dimension index (1..dims) of the axis to refine
◆ not_equal()
|
private |
Test whether two reals differ beyond machine precision.

◆ parcur()
| pure subroutine, public fitpack_core::parcur | ( | integer(fp_size), intent(in) | iopt, |
| integer(fp_size), intent(in) | ipar, | ||
| integer(fp_size), intent(in) | idim, | ||
| integer(fp_size), intent(in) | m, | ||
| real(fp_real), dimension(m), intent(inout) | u, | ||
| integer(fp_size), intent(in) | mx, | ||
| real(fp_real), dimension(idim,m), intent(in) | x, | ||
| real(fp_real), dimension(m), intent(inout) | w, | ||
| real(fp_real), intent(inout) | ub, | ||
| real(fp_real), intent(inout) | ue, | ||
| integer(fp_size), intent(in) | k, | ||
| real(fp_real), intent(inout) | s, | ||
| integer(fp_size), intent(in) | nest, | ||
| integer(fp_size), intent(inout) | n, | ||
| real(fp_real), dimension(nest), intent(inout) | t, | ||
| integer(fp_size), intent(in) | nc, | ||
| real(fp_real), dimension(nc), intent(inout) | c, | ||
| real(fp_real), intent(out) | fp, | ||
| real(fp_real), dimension(lwrk), intent(inout) | wrk, | ||
| integer(fp_size), intent(in) | lwrk, | ||
| integer(fp_size), dimension(nest), intent(inout) | iwrk, | ||
| integer(fp_flag), intent(out) | ier ) |
Determine a smooth parametric spline curve approximation.
Given \( m \) ordered points \( \mathbf{x}_i \in \mathbb{R}^{\text{idim}} \) with weights \( w_i > 0 \) and parameter values \( u_i \), computes an open parametric spline curve \( \mathbf{s}(u) = (s_1(u),\ldots,s_{\text{idim}}(u)) \) of degree \( k \) on \( [u_b, u_e] \).
If ipar=0, parameter values are computed automatically from cumulative chord lengths: \( u_i = v_i / v_m \) where \( v_i = v_{i-1} + \|\mathbf{x}_i - \mathbf{x}_{i-1}\| \), with \( u_b = 0 \) and \( u_e = 1 \).
Smoothness is controlled by requiring \( F(p) = \sum w_i^2 \|\mathbf{x}_i - \mathbf{s}(u_i)\|^2 \le S \).
- Parameters
-
[in] iopt Computation mode: -1(LSQ),0(new smoothing),1(continue).[in] ipar Parameter mode: 0= automatic,1= user-supplied.[in] idim Dimension of the curve, \( 1 \le \text{idim} \le 10 \). [in] m Number of data points, \( m > k \). [in,out] u Parameter values (length \( m \)). Output when ipar=0.[in] mx Declared dimension of x, \( \ge \text{idim} \times m \).[in] x Data coordinates (length mx):x(idim*(i-1)+j)= \( j \)-th coordinate of point \( i \).[in,out] w Weights (length \( m \)), strictly positive. [in,out] ub Lower parameter bound. Set to 0 when ipar=0.[in,out] ue Upper parameter bound. Set to 1 when ipar=0.[in] k Spline degree, \( 1 \le k \le 5 \). Cubic recommended. [in,out] s Smoothing factor \( S \ge 0 \). [in] nest Over-estimate of total knots. nest=m+k+1always suffices.[in,out] n Total number of knots. [in,out] t Knot positions (length nest).[in] nc Declared dimension of c, \( \ge \text{nest} \times \text{idim} \).[in,out] c B-spline coefficients (length nc).[out] fp Weighted sum of squared residuals. [in,out] wrk Real workspace, length \( \ge m(k+1) + \text{nest}(6+\text{idim}+3k) \). [in] lwrk Declared dimension of wrk.[in,out] iwrk Integer workspace (length nest).[out] ier Error flag (same codes as curfit).
- See also
- Dierckx, Ch. 6, §6.3; fppara — core parametric fitting algorithm
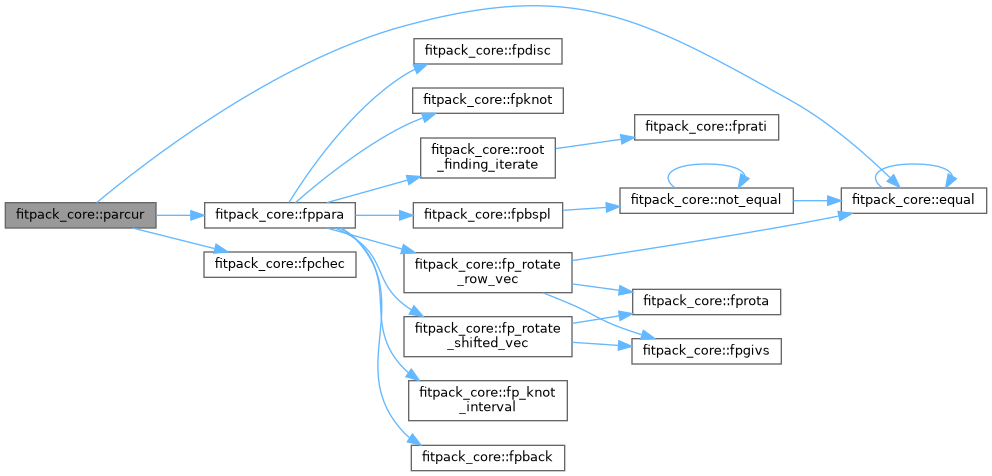
◆ parder()
| pure subroutine, public fitpack_core::parder | ( | integer(fp_dim), intent(in) | dims, |
| real(fp_real), dimension(:,:), intent(in) | t, | ||
| integer(fp_size), dimension(dims), intent(in) | n, | ||
| real(fp_real), dimension(:), intent(in) | c, | ||
| integer(fp_size), dimension(dims), intent(in) | k, | ||
| integer(fp_size), dimension(dims), intent(in) | nu, | ||
| real(fp_real), dimension(:,:), intent(in) | xg, | ||
| integer(fp_size), dimension(dims), intent(in) | m, | ||
| real(fp_real), dimension(:), intent(out) | z, | ||
| real(fp_real), dimension(lwrk), intent(inout) | wrk, | ||
| integer(fp_size), intent(in) | lwrk, | ||
| integer(fp_size), dimension(kwrk), intent(inout) | iwrk, | ||
| integer(fp_size), intent(in) | kwrk, | ||
| integer(fp_flag), intent(out) | ier ) |
Evaluate a partial derivative of a tensor-product spline on a grid (any dimension).
Computes the derivative coefficients via pardtc, then evaluates the resulting reduced-degree spline on the grid through the N-D evaluation front-end ndspev. The flat real workspace is carved into [nc derivative coefficients | ndspev basis scratch], mirroring 2-D parder.
- Parameters
-
[in] dims Number of axes (domain dimension) [in] t Per-axis knot vectors; column \( d \) is t(1:n(d),d)[in] n Number of knots per axis, n(dims)[in] c B-spline coefficient tensor, flat row-major (first axis slowest) [in] k Spline degree per axis, k(dims)[in] nu Derivative order per axis, \( 0 \le \nu_d < k_d \) [in] xg Per-axis evaluation grids; column \( d \) is xg(1:m(d),d)[in] m Number of evaluation points per axis, m(dims)[out] z Derivative values, flat row-major, length product(m)[in,out] wrk Real workspace, length \( \ge \prod_d nk1_d + \max_d m_d\,(\max_d(k_d{-}\nu_d){+}1)\,d \) [in] lwrk Declared dimension of wrk[in,out] iwrk Integer workspace, length \( \ge \max_d m_d \cdot dims \) [in] kwrk Declared dimension of iwrk[out] ier FITPACK_OK on success, FITPACK_INPUT_ERROR on bad input/workspace
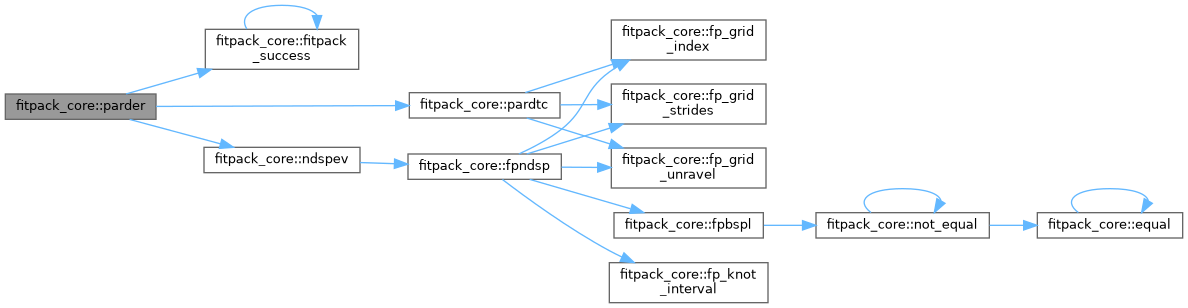
◆ pardeu()
| pure subroutine, public fitpack_core::pardeu | ( | integer(fp_dim), intent(in) | dims, |
| real(fp_real), dimension(:,:), intent(in) | t, | ||
| integer(fp_size), dimension(dims), intent(in) | n, | ||
| real(fp_real), dimension(:), intent(in) | c, | ||
| integer(fp_size), dimension(dims), intent(in) | k, | ||
| integer(fp_size), dimension(dims), intent(in) | nu, | ||
| real(fp_real), dimension(:,:), intent(in), contiguous | xg, | ||
| integer(fp_size), intent(in) | m, | ||
| real(fp_real), dimension(m), intent(out) | z, | ||
| real(fp_real), dimension(lwrk), intent(inout) | wrk, | ||
| integer(fp_size), intent(in) | lwrk, | ||
| integer(fp_flag), intent(out) | ier ) |
Evaluate a partial derivative of a tensor-product spline at scattered points (any dimension).
Scattered-point counterpart of parder: derivative coefficients via pardtc, then a per-point evaluation via ndspeu. Only the derivative coefficients need workspace.
- Parameters
-
[in] dims Number of axes (domain dimension) [in] t Per-axis knot vectors; column \( d \) is t(1:n(d),d)[in] n Number of knots per axis, n(dims)[in] c B-spline coefficient tensor, flat row-major (first axis slowest) [in] k Spline degree per axis, k(dims)[in] nu Derivative order per axis, \( 0 \le \nu_d < k_d \) [in] xg Point coordinates, xg(d,i)is the axis- \( d \) coordinate of point \( i \) (point \( i \) = contiguous columnxg(:,i))[in] m Number of evaluation points, \( m \ge 1 \) [out] z Derivative values at the points, z(m)[in,out] wrk Real workspace, length \( \ge \prod_d (n(d)-k(d)-1) \) [in] lwrk Declared dimension of wrk[out] ier FITPACK_OK on success, FITPACK_INPUT_ERROR on bad input/workspace
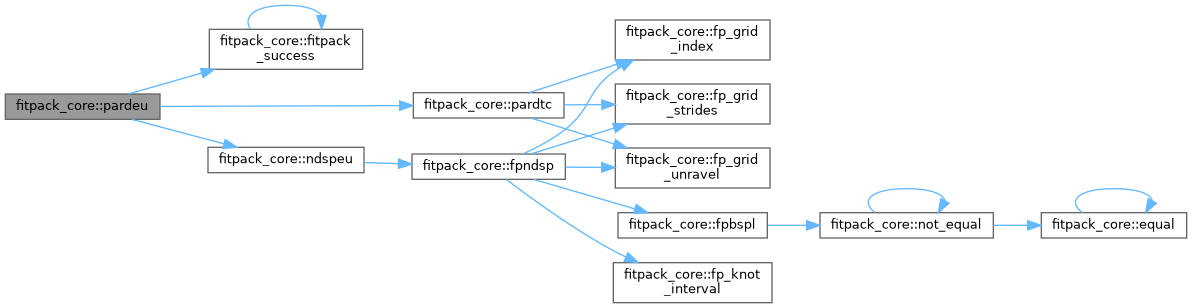
◆ pardtc()
| pure subroutine, public fitpack_core::pardtc | ( | integer(fp_dim), intent(in) | dims, |
| real(fp_real), dimension(:,:), intent(in) | t, | ||
| integer(fp_size), dimension(dims), intent(in) | n, | ||
| real(fp_real), dimension(:), intent(in) | c, | ||
| integer(fp_size), dimension(dims), intent(in) | k, | ||
| integer(fp_size), dimension(dims), intent(in) | nu, | ||
| real(fp_real), dimension(:), intent(out) | newc, | ||
| integer(fp_flag), intent(out) | ier ) |
B-spline coefficients of a partial-derivative spline (any dimension).
The partial derivative \( \partial^{\nu_1+\cdots+\nu_d} s / \partial x_1^{\nu_1}\cdots
\partial x_d^{\nu_d} \) of a tensor-product spline is itself a tensor-product spline of per-axis degrees \( k_d-\nu_d \) over the trimmed knot vectors \( t(\nu_d{+}1:n_d{-}\nu_d,d) \). This routine returns that spline's coefficients. The 1-D B-spline derivative recurrence is applied nu(d) times along each axis d; after each axis the tensor is repacked contiguously (the N-D replacement for the 2-D "gaps + compaction" trick). Every output coefficient is a single independent expression (no summation), so at dims=2 the result reduces to the classic bivariate coefficient transform regardless of the fiber-iteration order.
- Parameters
-
[in] dims Number of axes (domain dimension) [in] t Per-axis knot vectors; column \( d \) is t(1:n(d),d)[in] n Number of knots per axis, n(dims)[in] c Input B-spline coefficient tensor, flat row-major (first axis slowest) [in] k Spline degree per axis, k(dims)[in] nu Derivative order per axis, \( 0 \le \nu_d < k_d \) [out] newc Derivative coefficients, packed contiguously at the front (row-major over the reduced tensor of size \( \prod_d (n(d)-k(d)-1-\nu_d) \)); must be sized \( \ge \prod_d (n(d)-k(d)-1) \) [out] ier FITPACK_OK on success, FITPACK_INPUT_ERROR on bad input
◆ parsur()
| pure subroutine, public fitpack_core::parsur | ( | integer(fp_size), intent(in) | iopt, |
| integer(fp_size), dimension(2), intent(in) | ipar, | ||
| integer(fp_size), intent(in) | idim, | ||
| integer(fp_size), intent(in) | mu, | ||
| real(fp_real), dimension(mu), intent(in) | u, | ||
| integer(fp_size), intent(in) | mv, | ||
| real(fp_real), dimension(mv), intent(in) | v, | ||
| real(fp_real), dimension(mu*mv*idim), intent(in) | f, | ||
| real(fp_real), intent(in) | s, | ||
| integer(fp_size), intent(in) | nuest, | ||
| integer(fp_size), intent(in) | nvest, | ||
| integer(fp_size), intent(inout) | nu, | ||
| real(fp_real), dimension(nuest), intent(inout) | tu, | ||
| integer(fp_size), intent(inout) | nv, | ||
| real(fp_real), dimension(nvest), intent(inout) | tv, | ||
| real(fp_real), dimension((nuest-4)*(nvest-4)*idim), intent(inout) | c, | ||
| real(fp_real), intent(inout) | fp, | ||
| real(fp_real), dimension(lwrk), intent(inout) | wrk, | ||
| integer(fp_size), intent(in) | lwrk, | ||
| integer(fp_size), dimension(kwrk), intent(inout) | iwrk, | ||
| integer(fp_size), intent(in) | kwrk, | ||
| integer(fp_flag), intent(out) | ier ) |
Fit a smooth parametric surface to gridded data.
Given data points \( \mathbf{f}(i,j) \in \mathbb{R}^d \) at the grid nodes \( (u_i, v_j) \), \( i=1,\ldots,m_u;\ j=1,\ldots,m_v \), determines a smooth \( d \)-dimensional bicubic spline

◆ percur()
| pure subroutine, public fitpack_core::percur | ( | integer(fp_size), intent(in) | iopt, |
| integer(fp_size), intent(in) | m, | ||
| real(fp_real), dimension(m), intent(in) | x, | ||
| real(fp_real), dimension(m), intent(in) | y, | ||
| real(fp_real), dimension(m), intent(in) | w, | ||
| integer(fp_size), intent(in) | k, | ||
| real(fp_real), intent(in) | s, | ||
| integer(fp_size), intent(in) | nest, | ||
| integer(fp_size), intent(inout) | n, | ||
| real(fp_real), dimension(nest), intent(inout) | t, | ||
| real(fp_real), dimension(nest), intent(inout) | c, | ||
| real(fp_real), intent(inout) | fp, | ||
| real(fp_real), dimension(lwrk), intent(inout) | wrk, | ||
| integer(fp_size), intent(in) | lwrk, | ||
| integer(fp_size), dimension(nest), intent(inout) | iwrk, | ||
| integer(fp_flag), intent(inout) | ier ) |
Determine a smooth periodic spline approximation to data.
Given data points \( (x_i, y_i) \) with weights \( w_i > 0 \), \( i=1,\ldots,m \), computes a periodic spline \( s(x) \) of degree \( k \) with period \( P = x_m - x_1 \). The periodicity means \( s(x_1) = s(x_m) \) and all derivatives match at the boundary.
- If
iopt=-1: weighted least-squares spline with user-specified knots. - If
iopt>=0: automatic knot placement minimizing the discontinuity jumps of the \( k \)-th derivative, subject to \( F(p) \le S \).
- Parameters
-
[in] iopt Computation mode: -1(LSQ),0(new smoothing),1(continue).[in] m Number of data points, \( m > 1 \). [in] x Abscissae (strictly ascending). \( x_m \) defines the period length. [in] y Ordinates \( y_1,\ldots,y_{m-1} \) (element \( y_m \) not used). [in] w Weights \( w_1,\ldots,w_{m-1} > 0 \) ( \( w_m \) not used). [in] k Spline degree, \( 1 \le k \le 5 \). Cubic ( \( k=3 \)) recommended. [in] s Smoothing factor \( S \ge 0 \) (used when iopt>=0).[in] nest Over-estimate of total knots. nest>=2*k+2;nest=m+2*kalways suffices.[in,out] n Total number of knots. [in,out] t Knot positions (length nest).[in,out] c B-spline coefficients (length nest).[in,out] fp Weighted sum of squared residuals. [in,out] wrk Real workspace, length \( \ge m(k+1) + \text{nest}(8+5k) \). [in] lwrk Declared dimension of wrk.[in,out] iwrk Integer workspace (length nest).[in,out] ier Error flag (same codes as curfit, plus periodic constraints).
- See also
- Dierckx, Ch. 6, §6.1–6.2; fpperi — core periodic fitting algorithm
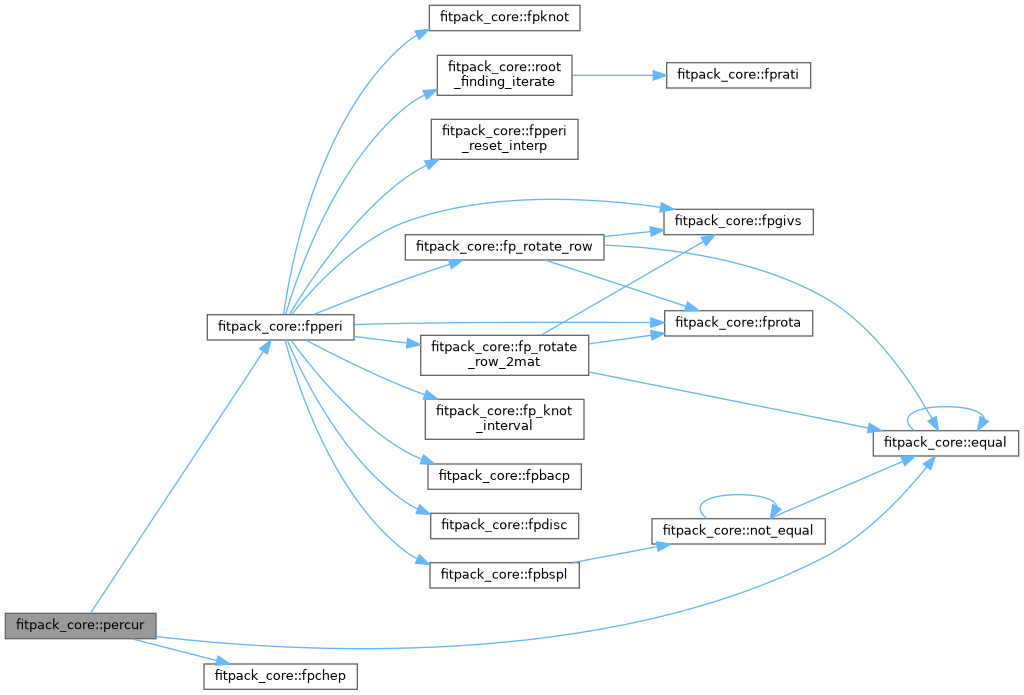
◆ pogrid()
| subroutine, public fitpack_core::pogrid | ( | integer(fp_size), dimension(3), intent(in) | iopt, |
| integer(fp_size), dimension(2), intent(in) | ider, | ||
| integer(fp_size), intent(in) | mu, | ||
| real(fp_real), dimension(mu), intent(in) | u, | ||
| integer(fp_size), intent(in) | mv, | ||
| real(fp_real), dimension(mv), intent(in) | v, | ||
| real(fp_real), dimension(mu*mv), intent(in) | z, | ||
| real(fp_real), intent(in) | z0, | ||
| real(fp_real), intent(in) | r, | ||
| real(fp_real), intent(in) | s, | ||
| integer(fp_size), intent(in) | nuest, | ||
| integer(fp_size), intent(in) | nvest, | ||
| integer(fp_size), intent(inout) | nu, | ||
| real(fp_real), dimension(nuest), intent(inout) | tu, | ||
| integer(fp_size), intent(inout) | nv, | ||
| real(fp_real), dimension(nvest), intent(inout) | tv, | ||
| real(fp_real), dimension((nuest-4)*(nvest-4)), intent(inout) | c, | ||
| real(fp_real), intent(inout) | fp, | ||
| real(fp_real), dimension(lwrk), intent(inout) | wrk, | ||
| integer(fp_size), intent(in) | lwrk, | ||
| integer(fp_size), dimension(kwrk), intent(inout) | iwrk, | ||
| integer(fp_size), intent(in) | kwrk, | ||
| integer(fp_flag), intent(out) | ier ) |
Fit a smooth bivariate spline to gridded data on a polar (disc) domain.
Fits a function \( f(x,y) \) to data \( z_{ij} \) at the nodes \( (x,y) = (u_i \cos v_j,\ u_i \sin v_j) \) of a radius-angle grid over the disc
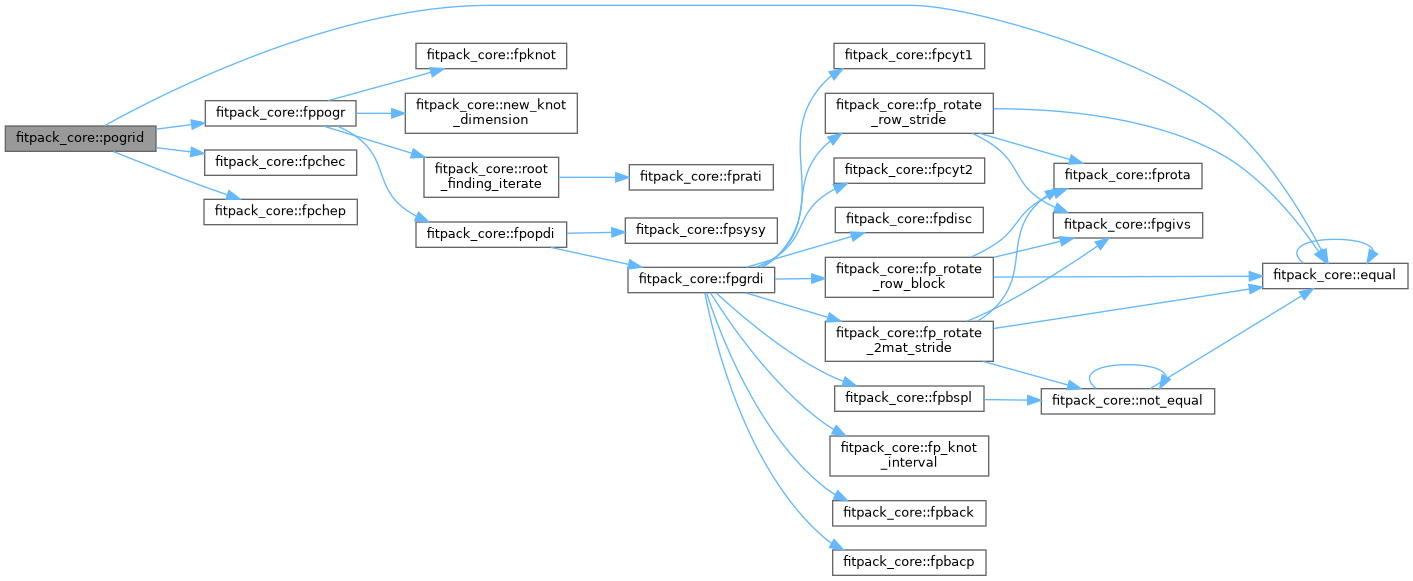
◆ polar()
| pure subroutine, public fitpack_core::polar | ( | integer(fp_size), dimension(3), intent(in) | iopt, |
| integer(fp_size), intent(in) | m, | ||
| real(fp_real), dimension(m), intent(in) | x, | ||
| real(fp_real), dimension(m), intent(in) | y, | ||
| real(fp_real), dimension(m), intent(in) | z, | ||
| real(fp_real), dimension(m), intent(in) | w, | ||
| procedure(fitpack_polar_boundary) | rad, | ||
| real(fp_real), intent(in) | s, | ||
| integer(fp_size), intent(in) | nuest, | ||
| integer(fp_size), intent(in) | nvest, | ||
| real(fp_real), intent(in) | eps, | ||
| integer(fp_size), intent(out) | nu, | ||
| real(fp_real), dimension(nuest), intent(out) | tu, | ||
| integer(fp_size), intent(out) | nv, | ||
| real(fp_real), dimension(nvest), intent(out) | tv, | ||
| real(fp_real), dimension(m), intent(out) | u, | ||
| real(fp_real), dimension(m), intent(out) | v, | ||
| real(fp_real), dimension((nuest-4)*(nvest-4)), intent(out) | c, | ||
| real(fp_real), intent(inout) | fp, | ||
| real(fp_real), dimension(lwrk1), intent(inout) | wrk1, | ||
| integer(fp_size), intent(in) | lwrk1, | ||
| real(fp_real), dimension(lwrk2), intent(inout) | wrk2, | ||
| integer(fp_size), intent(in) | lwrk2, | ||
| integer(fp_size), dimension(kwrk), intent(inout) | iwrk, | ||
| integer(fp_size), intent(in) | kwrk, | ||
| integer(fp_flag), intent(out) | ier ) |
Fit a smooth bivariate spline to scattered data on a polar domain.
Given weighted data points \( (x_i, y_i, z_i, w_i) \) on a polar domain bounded by \( x = r(v)\cos v,\ y = r(v)\sin v \) for \( -\pi \le v \le \pi \), determines a
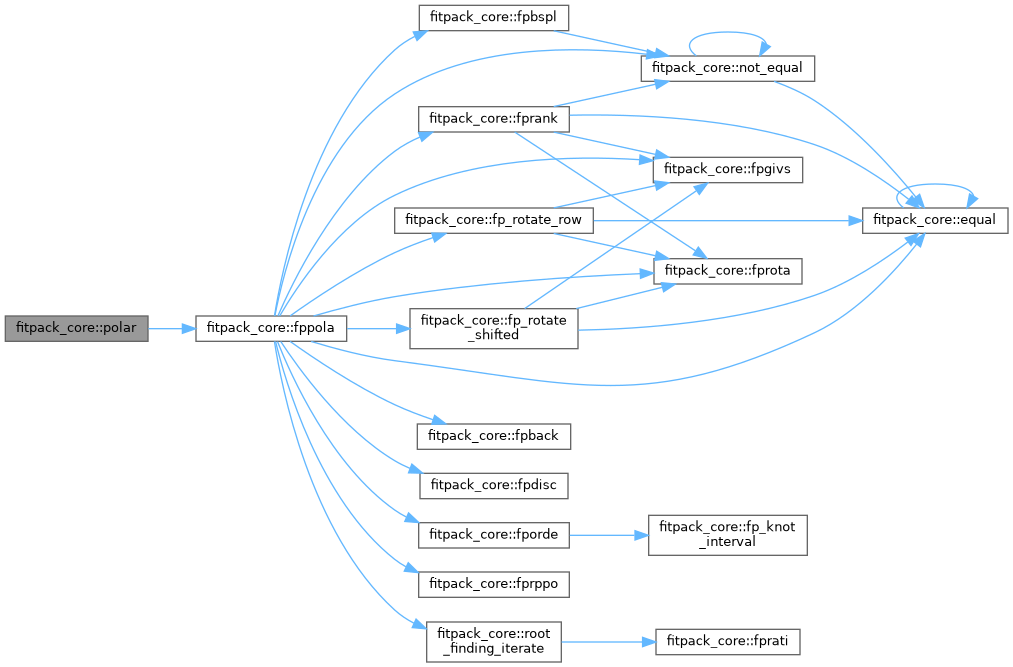
◆ profil()
| pure subroutine, public fitpack_core::profil | ( | integer(fp_dim), intent(in) | ax, |
| integer(fp_dim), intent(in) | dims, | ||
| real(fp_real), dimension(:,:), intent(in) | t, | ||
| integer(fp_size), dimension(dims), intent(in) | n, | ||
| real(fp_real), dimension(:), intent(in) | c, | ||
| integer(fp_size), dimension(dims), intent(in) | k, | ||
| real(fp_real), intent(in) | u, | ||
| real(fp_real), dimension(:), intent(out) | cu, | ||
| integer(fp_flag), intent(out) | ier ) |
Cross-section of a tensor-product spline: fix one axis (any dimension).
Fixing axis ax at the value u collapses one tensor rank: the result is the coefficient tensor of a dims-1-D spline over the remaining axes (their knot vectors and degrees are unchanged, in their original relative order). The fixed axis' k(ax)+1 non-zero B-splines at u are contracted against the coefficient support along that axis. At dims=2 this reduces to the classic bivariate cross-section (the same fpbspl values and dot_product accumulation).
- Parameters
-
[in] ax Axis to fix, \( 1 \le ax \le dims \) [in] dims Number of axes (domain dimension) [in] t Per-axis knot vectors; column \( d \) is t(1:n(d),d)[in] n Number of knots per axis, n(dims)[in] c B-spline coefficient tensor, flat row-major (first axis slowest) [in] k Spline degree per axis, k(dims)[in] u Value at which axis axis fixed, \( t(k(ax){+}1,ax) \le u \le t(nk1(ax){+}1,ax) \)[out] cu Cross-section coefficients: flat row-major over the surviving axes (in original order, skipping ax), length \( \prod_{d \ne ax}(n(d)-k(d)-1) \)[out] ier FITPACK_OK on success, FITPACK_INPUT_ERROR on bad input
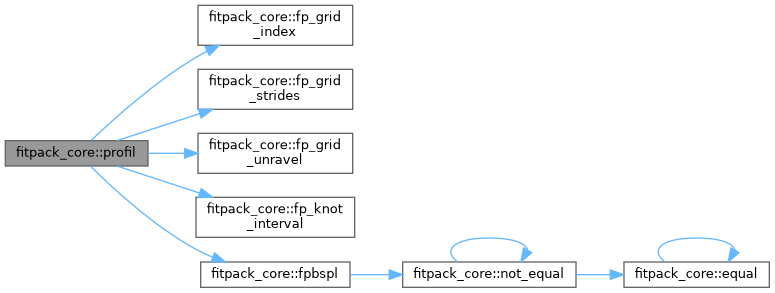
◆ regrid()
| pure subroutine, public fitpack_core::regrid | ( | integer(fp_size), intent(in) | iopt, |
| integer(fp_dim), intent(in) | dims, | ||
| integer(fp_size), dimension(dims), intent(in) | m, | ||
| real(fp_real), dimension(:,:), intent(in), contiguous | xg, | ||
| real(fp_real), dimension(*), intent(in) | z, | ||
| real(fp_real), dimension(dims), intent(in) | lo, | ||
| real(fp_real), dimension(dims), intent(in) | hi, | ||
| integer(fp_size), dimension(dims), intent(in) | k, | ||
| real(fp_real), intent(in) | s, | ||
| integer(fp_size), dimension(dims), intent(in) | nest, | ||
| integer(fp_size), dimension(dims), intent(inout) | n, | ||
| real(fp_real), dimension(:,:), intent(inout), contiguous | t, | ||
| real(fp_real), dimension(*), intent(inout) | c, | ||
| real(fp_real), intent(out) | fp, | ||
| real(fp_real), dimension(lwrk), intent(inout), target | wrk, | ||
| integer(fp_size), intent(in) | lwrk, | ||
| integer(fp_size), dimension(kwrk), intent(inout), target | iwrk, | ||
| integer(fp_size), intent(in) | kwrk, | ||
| integer(fp_flag), intent(out) | ier ) |
Tensor-product gridded smoothing-spline fit driver for any domain dimension dims.
Fits a dims-fold tensor-product B-spline to data on a rectangular grid. Validation, boundary-knot clamping and Schoenberg-Whitney (fpchec) checks are runtime do-loops over the dims axes; the knot-direction arbiter is the N-D new_knot_dimension_nd. At dims=2 this is the engine behind the bivariate grid surface and the fp_regrid_c binding.
WORKSPACE (no allocation): the caller supplies a flat real wrk(lwrk) and integer iwrk(kwrk), both target. regrid carves them into the rank-N work views needed by fpregr/fpgrre via pointer bounds remapping. The persistent fit-state lives at fixed offsets: wrk(1)=fp0, wrk(2)=fpold, wrk(3:2+dims)=reduc; iwrk(1)=lastdi, iwrk(2:1+dims)=nplus – so preserving wrk/iwrk between calls (with iopt=1) continues from the previous knot set.
Minimum sizes: lwrk >= 2 + dims + nestmax*dims + mmax*(kmax+1)*dims + 2*nestmax*(kmax+2)*dims + mm + mq kwrk >= 1 + dims + mmax*dims + nestmax*dims with mmax=maxval(m), nestmax=maxval(nest), kmax=maxval(k), nk1max=nest-(k+1): mq = 2*max_{i=1..dims-1} [ product(nk1max(1:i)) * product(m(i+1:dims)) ] mm = max(nestmax, mmax, product(m(2:dims)), product(nk1max(1:dims-1)))
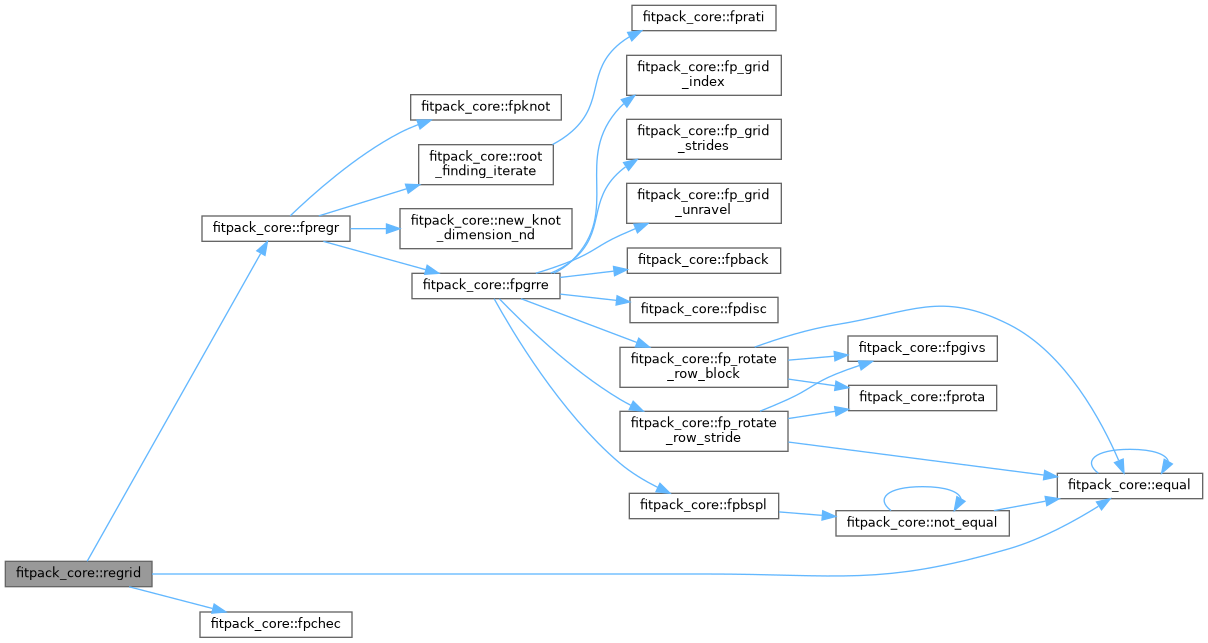
◆ root_finding_iterate()
|
private |
Update the smoothing parameter \( p \) during iterative knot selection.
Given the current iterate \( (p, F(p) - S) \) and the bracketing triple \( (p_1, F_1), (p_2, F_2), (p_3, F_3) \) with \( F_1 > 0 \) and \( F_3 < 0 \), updates the bracket and computes the next estimate via rational interpolation (fprati, Eq. 5.30).
During the initial phase (before the bracket is established), the routine adjusts \( p \) by multiplicative factors to find \( p \) values that bracket the root \( F(p) = 0 \).
- Parameters
-
[in,out] p1 Left bracket; satisfies \( F_1 > 0 \) [in,out] f1 \( F(p_1) - S \); updated with \( p_1 \) [in,out] p2 Most recent iterate; set to pon entry[in,out] f2 \( F(p_2) - S \); set to fpmson entry[in,out] p3 Right bracket; satisfies \( F_3 < 0 \) [in,out] f3 \( F(p_3) - S \); updated with \( p_3 \) [in,out] p Current smoothing parameter; updated to next estimate [in] fpms Current residual \( F(p) - S \) [in] acc Convergence tolerance [in,out] check1 .true.once lower bracket is established[in,out] check3 .true.once upper bracket is established[out] success .false.if iteration stalls (non-monotone \( F \))
- See also
- Dierckx, Ch. 5, §5.2.4 (pp. 83-86), Eq. 5.30-5.32

◆ spalde()
| pure subroutine, public fitpack_core::spalde | ( | real(fp_real), dimension(n), intent(in) | t, |
| integer(fp_size), intent(in) | n, | ||
| real(fp_real), dimension(n), intent(in) | c, | ||
| integer(fp_size), intent(in) | k1, | ||
| real(fp_real), intent(in) | x, | ||
| real(fp_real), dimension(k1), intent(out) | d, | ||
| integer(fp_flag), intent(out) | ier ) |
Evaluate all derivatives of a spline at a single point.
Given a spline \( s(x) \) of order \( k_1 = k + 1 \) (degree \( k \)) in B-spline representation, computes \( d_j = s^{(j-1)}(x) \) for \( j = 1,\ldots,k_1 \) using the stable recurrence scheme of de Boor.
- Parameters
-
[in] t Knot positions (length \( n \)). [in] n Total number of knots. [in] c B-spline coefficients (length \( n \)). [in] k1 Order of the spline ( \( k_1 = k + 1 \)). [in] x Point where derivatives are evaluated. Must satisfy \( t_{k_1} \le x \le t_{n-k_1+1} \). [out] d Derivative values (length \( k_1 \)): \( d(j) = s^{(j-1)}(x) \) for \( j = 1,\ldots,k_1 \). [out] ier Error flag: 0= normal return;10= invalid input.
- Note
- At a knot, right derivatives are computed (left derivatives at the right boundary).
- See also
- Dierckx, Ch. 1, §1.3; fpader — derivative computation kernel
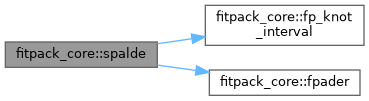
◆ spgrid()
| pure subroutine, public fitpack_core::spgrid | ( | integer(fp_size), dimension(3), intent(in) | iopt, |
| integer(fp_size), dimension(4), intent(in) | ider, | ||
| integer(fp_size), intent(in) | mu, | ||
| real(fp_real), dimension(mu), intent(in) | u, | ||
| integer(fp_size), intent(in) | mv, | ||
| real(fp_real), dimension(mv), intent(in) | v, | ||
| real(fp_real), dimension(mu*mv), intent(in) | r, | ||
| real(fp_real), intent(in) | r0, | ||
| real(fp_real), intent(in) | r1, | ||
| real(fp_real), intent(in) | s, | ||
| integer(fp_size), intent(in) | nuest, | ||
| integer(fp_size), intent(in) | nvest, | ||
| integer(fp_size), intent(inout) | nu, | ||
| real(fp_real), dimension(nuest), intent(inout) | tu, | ||
| integer(fp_size), intent(inout) | nv, | ||
| real(fp_real), dimension(nvest), intent(inout) | tv, | ||
| real(fp_real), dimension((nuest-4)*(nvest-4)), intent(inout) | c, | ||
| real(fp_real), intent(inout) | fp, | ||
| real(fp_real), dimension(lwrk), intent(inout) | wrk, | ||
| integer(fp_size), intent(in) | lwrk, | ||
| integer(fp_size), dimension(kwrk), intent(inout) | iwrk, | ||
| integer(fp_size), intent(in) | kwrk, | ||
| integer(fp_flag), intent(out) | ier ) |
Fit a smooth bivariate spline to gridded data on a sphere (latitude-longitude grid).
Given data values \( r_{ij} \) on the latitude-longitude grid \( (u_i, v_j) \) with \( 0 < u_i < \pi \) (colatitude), \( v_b \le v_j < v_b + 2\pi \) (longitude), determines a bicubic spline \( s(u,v) \) satisfying pole continuity constraints (value and optional gradient at \( u=0 \) and \( u=\pi \)) and periodicity in \( v \):
\[ \sum_{i,j}(r_{ij} - s(u_i,v_j))^2 + (r_0 - s(0,v))^2 + (r_1 - s(\pi,v))^2 \le s. \]
- Parameters
-
[in] iopt Integer array(3): iopt(1)= computation mode (-1/0/1);iopt(2)= continuity order at pole \( u=0 \) (0/1);iopt(3)= continuity order at pole \( u=\pi \) (0/1).[in] ider Integer array(4): pole data/derivative flags — ider(1)andider(3)specify whether data at poles exist;ider(2)andider(4)specify vanishing derivatives.[in] mu Number of latitude grid points, \( 0 < u_i < \pi \). [in] u Strictly increasing colatitudes (length \( m_u \)). [in] mv Number of longitude grid points, \( m_v > 3 \). [in] v Strictly increasing longitudes (length \( m_v \)), \( -\pi \le v_1 < \pi,\ v_{m_v} < v_1 + 2\pi \).
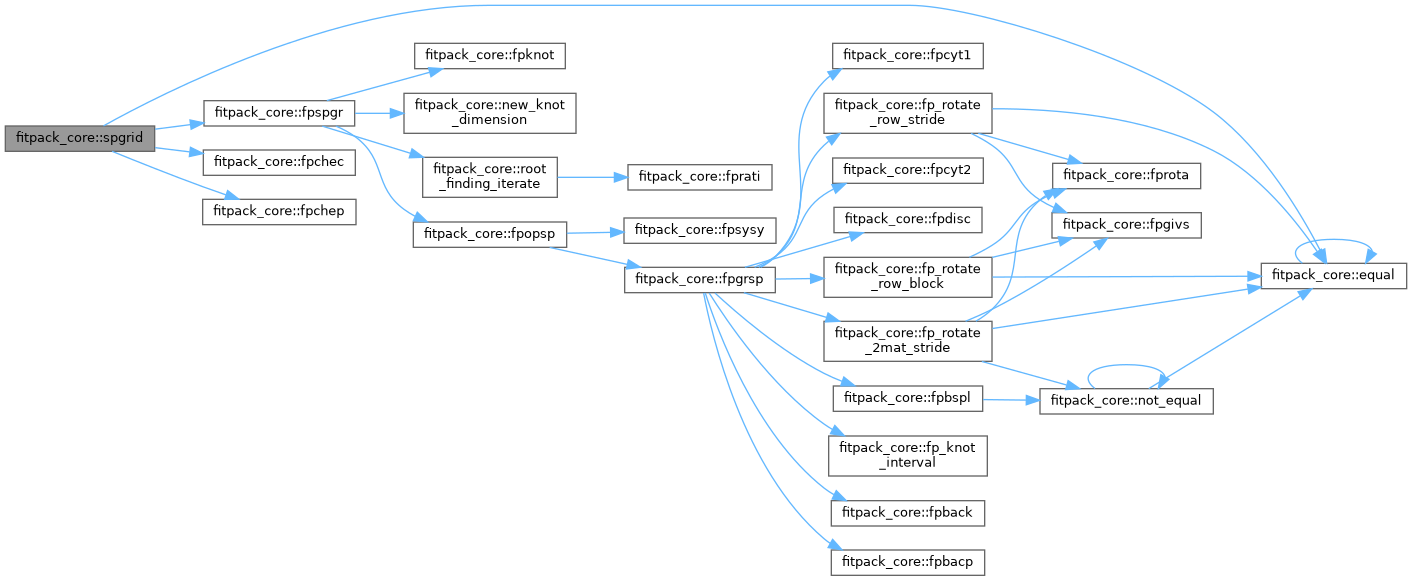
◆ sphere()
| pure subroutine, public fitpack_core::sphere | ( | integer(fp_size), intent(in) | iopt, |
| integer(fp_size), intent(in) | m, | ||
| real(fp_real), dimension(m), intent(in) | teta, | ||
| real(fp_real), dimension(m), intent(in) | phi, | ||
| real(fp_real), dimension(m), intent(in) | r, | ||
| real(fp_real), dimension(m), intent(in) | w, | ||
| real(fp_real), intent(in) | s, | ||
| integer(fp_size), intent(in) | ntest, | ||
| integer(fp_size), intent(in) | npest, | ||
| real(fp_real), intent(in) | eps, | ||
| integer(fp_size), intent(inout) | nt, | ||
| real(fp_real), dimension(ntest), intent(inout) | tt, | ||
| integer(fp_size), intent(inout) | np, | ||
| real(fp_real), dimension(npest), intent(inout) | tp, | ||
| real(fp_real), dimension((ntest-4)*(npest-4)), intent(inout) | c, | ||
| real(fp_real), intent(inout) | fp, | ||
| real(fp_real), dimension(lwrk1), intent(inout) | wrk1, | ||
| integer(fp_size), intent(in) | lwrk1, | ||
| real(fp_real), dimension(lwrk2), intent(inout) | wrk2, | ||
| integer(fp_size), intent(in) | lwrk2, | ||
| integer(fp_size), dimension(kwrk), intent(inout) | iwrk, | ||
| integer(fp_size), intent(in) | kwrk, | ||
| integer(fp_flag), intent(out) | ier ) |
Fit a smooth bicubic spherical spline to scattered data on a sphere.
Given weighted data points \( (\theta_i, \phi_i, r_i, w_i) \), \( i=1,\ldots,m \), with \( 0 \le \theta \le \pi \) (colatitude) and \( 0 \le \phi \le 2\pi \) (longitude), determines a bicubic spline \( s(\theta, \phi) \) satisfying:
- Pole constraints: \( s(0,\phi) \) and \( s(\pi,\phi) \) are constant.
- Periodicity in \( \phi \): derivatives match at \( \phi = 0 \) and \( \phi = 2\pi \).
- Gradient constraints at poles for smooth angular dependence.
The smoothing factor \( s \ge 0 \) controls the trade-off:
\[ \sum_{i=1}^{m} \bigl[w_i\,(r_i - s(\theta_i, \phi_i))\bigr]^2 \le s. \]
- Parameters
-
[in] iopt Computation mode: -1= least-squares with user knots;0= smoothing, fresh start;1= smoothing, continue.[in] m Number of data points, \( m \ge 2 \). [in] teta Colatitudes \( \theta_i \in [0, \pi] \) (length \( m \)). [in] phi Longitudes \( \phi_i \in [0, 2\pi] \) (length \( m \)). [in] r Data values (length \( m \)). [in] w Positive weights (length \( m \)). [in] s Smoothing factor, \( s \ge 0 \) (ignored when iopt=-1).[in] ntest Upper bound for \( n_\theta \), \( \ge 8 \). [in] npest Upper bound for \( n_\phi \), \( \ge 8 \). [in] eps Rank-deficiency threshold, \( 0 < \varepsilon < 1 \). [in,out] nt Total number of knots in \( \theta \). [in,out] tt Knot positions in \( \theta \) (length ntest).[in,out] np Total number of knots in \( \phi \). [in,out] tp Knot positions in \( \phi \) (length npest).[out] c B-spline coefficients, length \( (n_\theta{-}4)(n_\phi{-}4) \). [out] fp Weighted sum of squared residuals \( F_p \). [in,out] wrk1 Real workspace (length lwrk1).[in] lwrk1 Declared dimension of wrk1.[in,out] wrk2 Secondary workspace for rank-deficient systems (length lwrk2).[in] lwrk2 Declared dimension of wrk2.[in,out] iwrk Integer workspace (length kwrk).[in] kwrk Declared dimension of iwrk.[out] ier Error flag: \( \le 0 \) = success, 1–5= convergence warnings,10= invalid input,>10=lwrk2too small.
- See also
- Dierckx, Ch. 11, §11.2 (pp. 254–270); spgrid — gridded spherical variant
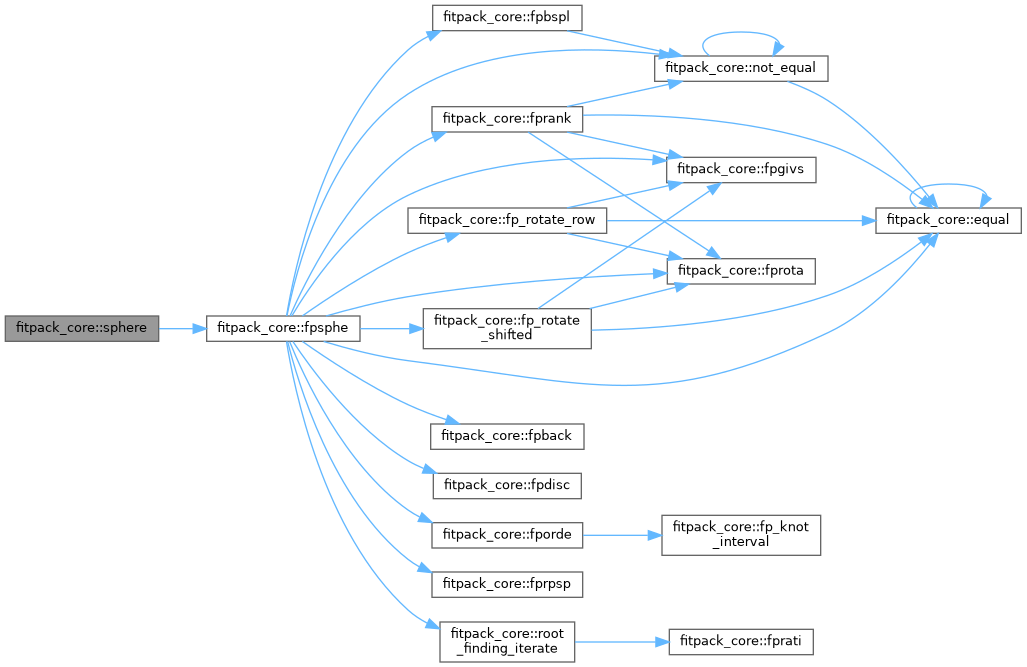
◆ splder()
| pure subroutine, public fitpack_core::splder | ( | real(fp_real), dimension(n), intent(in) | t, |
| integer(fp_size), intent(in) | n, | ||
| real(fp_real), dimension(n), intent(in) | c, | ||
| integer(fp_size), intent(in) | k, | ||
| integer(fp_size), intent(in) | nu, | ||
| real(fp_real), dimension(m), intent(in) | x, | ||
| real(fp_real), dimension(m), intent(out) | y, | ||
| integer(fp_size), intent(in) | m, | ||
| integer(fp_flag), intent(in) | e, | ||
| real(fp_real), dimension(n), intent(inout) | wrk, | ||
| integer(fp_flag), intent(out) | ier ) |
Evaluate the \( \nu \)-th derivative of a spline \( s(x) \) at a set of points.
Given a spline of degree \( k \) in B-spline representation, evaluates \( s^{(\nu)}(x_i) \) for \( i = 1,\ldots,m \) using the recurrence scheme of de Boor. The derivative of order \( \nu \) of a degree- \( k \) spline is a degree- \( (k{-}\nu) \) spline whose B-spline coefficients are computed via the de Boor recurrence.
- Parameters
-
[in] t Knot positions (length \( n \)). [in] n Total number of knots. [in] c B-spline coefficients (length \( n \)). [in] k Degree of the spline. [in] nu Order of derivative, \( 0 \le \nu \le k \). [in] x Evaluation points (length \( m \)). [out] y Derivative values \( s^{(\nu)}(x_i) \) (length \( m \)). [in] m Number of evaluation points, \( m \ge 1 \). [in] e Extrapolation mode for points outside the support: 0: extrapolate from end spans.1: return zero.2: setier=1and return.
[in,out] wrk Real workspace (length \( n \)). Contains derivative coefficients on exit. [out] ier Error flag: 0= normal;1= out of bounds withe=2;10= invalid input.
- See also
- Dierckx, Ch. 1, §1.3; fpbspl — B-spline basis evaluation

◆ splev()
| pure subroutine, public fitpack_core::splev | ( | real(fp_real), dimension(n), intent(in) | t, |
| integer(fp_size), intent(in) | n, | ||
| real(fp_real), dimension(n), intent(in) | c, | ||
| integer(fp_size), intent(in) | k, | ||
| real(fp_real), dimension(m), intent(in) | x, | ||
| real(fp_real), dimension(m), intent(out) | y, | ||
| integer(fp_size), intent(in) | m, | ||
| integer(fp_flag), intent(in) | e, | ||
| integer(fp_flag), intent(out) | ier ) |
Evaluate a spline \( s(x) \) of degree \( k \) at a set of points.
Given a spline in its B-spline representation (knots \( t \), coefficients \( c \), degree \( k \)), evaluates \( s(x_i) \) for \( i = 1,\ldots,m \).
- Parameters
-
[in] t Knot positions (length \( n \)). [in] n Total number of knots. [in] c B-spline coefficients (length \( n \)). [in] k Degree of the spline. [in] x Evaluation points (length \( m \)). [out] y Spline values \( s(x_i) \) (length \( m \)). [in] m Number of evaluation points. Must satisfy \( m \ge 1 \). [in] e Extrapolation mode for points outside \( [t_{k+1}, t_{n-k}] \): 0(OUTSIDE_EXTRAPOLATE): extrapolate from end spans.1(OUTSIDE_ZERO): return zero.2(OUTSIDE_NOT_ALLOWED): setier=1and return.3(OUTSIDE_NEAREST_BND): clamp to nearest boundary value.
[out] ier Error flag: 0= normal return;10= invalid input.
- See also
- Dierckx, Ch. 1, §1.3 (pp. 4–14); fpbspl — B-spline basis evaluation

◆ splint()
| real(fp_real) function, public fitpack_core::splint | ( | real(fp_real), dimension(n), intent(in) | t, |
| integer(fp_size), intent(in) | n, | ||
| real(fp_real), dimension(n), intent(in) | c, | ||
| integer(fp_size), intent(in) | k, | ||
| real(fp_real), intent(in) | a, | ||
| real(fp_real), intent(in) | b, | ||
| real(fp_real), dimension(n), intent(inout) | wrk ) |
Compute the definite integral of a spline \( s(x) \) over \( [a, b] \).
Calculates \( \int_a^b s(x)\,dx \) for a spline of degree \( k \) given in B-spline representation. The spline is considered identically zero outside its support \( (t_{k+1}, t_{n-k}) \).
Uses the method of Gaffney (1976): first computes the integrals of each normalized B-spline \( N_{i,k+1}(x) \) over \( [a, b] \), then forms the weighted sum with the spline coefficients.
- Parameters
-
[in] t Knot positions (length \( n \)). [in] n Total number of knots. [in] c B-spline coefficients (length \( n \)). [in] k Degree of the spline. [in] a Left endpoint of the integration interval. [in] b Right endpoint of the integration interval. [in,out] wrk Real workspace (length \( n \)). On exit, contains integrals of normalized B-splines.
- Returns
- The integral \( \int_a^b s(x)\,dx \).
- See also
- Dierckx, Ch. 1, §1.3.3 (pp. 10–12), Eq. 1.42–1.44; fpintb — B-spline integration
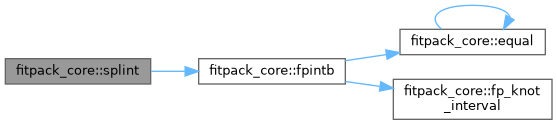
◆ sproot()
| pure subroutine, public fitpack_core::sproot | ( | real(fp_real), dimension(n), intent(in) | t, |
| integer(fp_size), intent(in) | n, | ||
| real(fp_real), dimension(n), intent(in) | c, | ||
| real(fp_real), dimension(mest), intent(out) | zeros, | ||
| integer(fp_size), intent(in) | mest, | ||
| integer(fp_size), intent(out) | m, | ||
| integer(fp_flag), intent(out) | ier ) |
Find the zeros of a cubic spline \( s(x) \) given in B-spline representation.
Locates all real roots of a cubic spline ( \( k = 3 \)) by reducing the problem to finding zeros of the cubic polynomial on each knot interval \( [t_l, t_{l+1}] \). Uses continuity of the spline and its derivative to propagate endpoint values across intervals, calling fpcuro for each cubic piece.
- Parameters
-
[in] t Knot positions (length \( n \)). Must satisfy \( n \ge 8 \). [in] n Total number of knots. [in] c B-spline coefficients (length \( n \)). [out] zeros Array of zeros found (length mest).[in] mest Maximum number of zeros that can be stored. [out] m Actual number of zeros found. [out] ier Error flag: 0: normal return.1: number of zeros exceedsmest.10: invalid input data.
- Note
- Only works for cubic splines ( \( k = 3 \)).
- See also
- fpcuro — cubic polynomial root finder
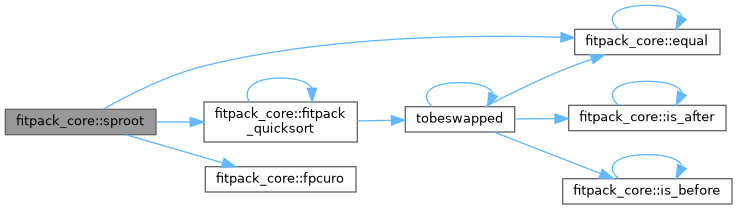
◆ surev()
| pure subroutine, public fitpack_core::surev | ( | integer(fp_size), intent(in) | idim, |
| real(fp_real), dimension(nu), intent(in) | tu, | ||
| integer(fp_size), intent(in) | nu, | ||
| real(fp_real), dimension(nv), intent(in) | tv, | ||
| integer(fp_size), intent(in) | nv, | ||
| real(fp_real), dimension((nu-4)*(nv-4)*idim), intent(in) | c, | ||
| real(fp_real), dimension(mu), intent(in) | u, | ||
| integer(fp_size), intent(in) | mu, | ||
| real(fp_real), dimension(mv), intent(in) | v, | ||
| integer(fp_size), intent(in) | mv, | ||
| real(fp_real), dimension(mf), intent(out) | f, | ||
| integer(fp_size), intent(in) | mf, | ||
| real(fp_real), dimension(lwrk), intent(inout) | wrk, | ||
| integer(fp_size), intent(in) | lwrk, | ||
| integer(fp_size), dimension(kwrk), intent(inout) | iwrk, | ||
| integer(fp_size), intent(in) | kwrk, | ||
| integer(fp_flag), intent(out) | ier ) |
Evaluate a parametric bicubic spline surface on a grid.
Evaluates an \( d \)-dimensional ( \( d = \) idim) bicubic spline surface at the grid \( (u_i, v_j) \), \( i=1,\ldots,m_u;\
j=1,\ldots,m_v \).

◆ surfit()
| pure subroutine, public fitpack_core::surfit | ( | integer(fp_size), intent(in) | iopt, |
| integer(fp_size), intent(in) | m, | ||
| real(fp_real), dimension(m), intent(inout) | x, | ||
| real(fp_real), dimension(m), intent(inout) | y, | ||
| real(fp_real), dimension(m), intent(in) | z, | ||
| real(fp_real), dimension(m), intent(in) | w, | ||
| real(fp_real), intent(in) | xb, | ||
| real(fp_real), intent(in) | xe, | ||
| real(fp_real), intent(in) | yb, | ||
| real(fp_real), intent(in) | ye, | ||
| integer(fp_size), intent(in) | kx, | ||
| integer(fp_size), intent(in) | ky, | ||
| real(fp_real), intent(in) | s, | ||
| integer(fp_size), intent(in) | nxest, | ||
| integer(fp_size), intent(in) | nyest, | ||
| integer(fp_size), intent(in) | nmax, | ||
| real(fp_real), intent(in) | eps, | ||
| integer(fp_size), intent(inout) | nx, | ||
| real(fp_real), dimension(nmax), intent(inout) | tx, | ||
| integer(fp_size), intent(inout) | ny, | ||
| real(fp_real), dimension(nmax), intent(inout) | ty, | ||
| real(fp_real), dimension((nxest-kx-1)*(nyest-ky-1)), intent(inout) | c, | ||
| real(fp_real), intent(inout) | fp, | ||
| real(fp_real), dimension(lwrk1), intent(inout) | wrk1, | ||
| integer(fp_size), intent(in) | lwrk1, | ||
| real(fp_real), dimension(lwrk2), intent(inout) | wrk2, | ||
| integer(fp_size), intent(in) | lwrk2, | ||
| integer(fp_size), dimension(kwrk), intent(inout) | iwrk, | ||
| integer(fp_size), intent(in) | kwrk, | ||
| integer(fp_flag), intent(out) | ier ) |
Fit a smoothing bivariate spline to scattered data.
Given weighted data points \( (x_i, y_i, z_i, w_i) \), \( i=1,\ldots,m \), determines a bivariate spline \( s(x,y) \) of degrees \( k_x, k_y \) on the rectangle \( [x_b, x_e] \times [y_b, y_e] \).
The smoothing factor \( s \ge 0 \) controls the trade-off: the routine minimizes discontinuity jumps in the spline derivatives subject to
\[ \sum_{i=1}^{m} \bigl[w_i\,(z_i - s(x_i, y_i))\bigr]^2 \le s. \]
Setting \( s = 0 \) produces an interpolating spline. The result is given in tensor-product B-spline representation and can be evaluated with bispev / bispeu.
- Parameters
-
[in] iopt Computation mode: -1= least-squares with user knots;0= smoothing, fresh start;1= smoothing, continue.[in] m Number of data points, \( m \ge (k_x{+}1)(k_y{+}1) \). [in,out] x \( x \)-coordinates of data points (length \( m \)). [in,out] y \( y \)-coordinates of data points (length \( m \)). [in] z Data values (length \( m \)). [in] w Positive weights (length \( m \)). [in] xb Lower \( x \)-boundary. [in] xe Upper \( x \)-boundary. [in] yb Lower \( y \)-boundary. [in] ye Upper \( y \)-boundary. [in] kx Degree in \( x \), \( 1 \le k_x \le 5 \) (bicubic recommended). [in] ky Degree in \( y \), \( 1 \le k_y \le 5 \). [in] s Smoothing factor, \( s \ge 0 \) (ignored when iopt=-1).[in] nxest Upper bound for \( n_x \), \( \ge 2(k_x{+}1) \). [in] nyest Upper bound for \( n_y \), \( \ge 2(k_y{+}1) \). [in] nmax Dimension of tx/tyarrays, \( \ge \max(n_x^{\text{est}}, n_y^{\text{est}}) \).[in] eps Rank-deficiency threshold, \( 0 < \varepsilon < 1 \). [in,out] nx Total number of knots in \( x \). [in,out] tx Knot positions in \( x \) (length nmax).[in,out] ny Total number of knots in \( y \). [in,out] ty Knot positions in \( y \) (length nmax).[out] c B-spline coefficients, length \( (n_x{-}k_x{-}1)(n_y{-}k_y{-}1) \). [out] fp Weighted sum of squared residuals \( F_p \). [in,out] wrk1 Real workspace (length lwrk1).[in] lwrk1 Declared dimension of wrk1.[in,out] wrk2 Secondary workspace for rank-deficient systems (length lwrk2).[in] lwrk2 Declared dimension of wrk2.[in,out] iwrk Integer workspace (length kwrk).[in] kwrk Declared dimension of iwrk.[out] ier Error flag: \( \le 0 \) = success, 1–5= convergence warnings,10= invalid input,>10=lwrk2too small.
- Note
- For gridded data, use regrid instead — it is significantly faster.
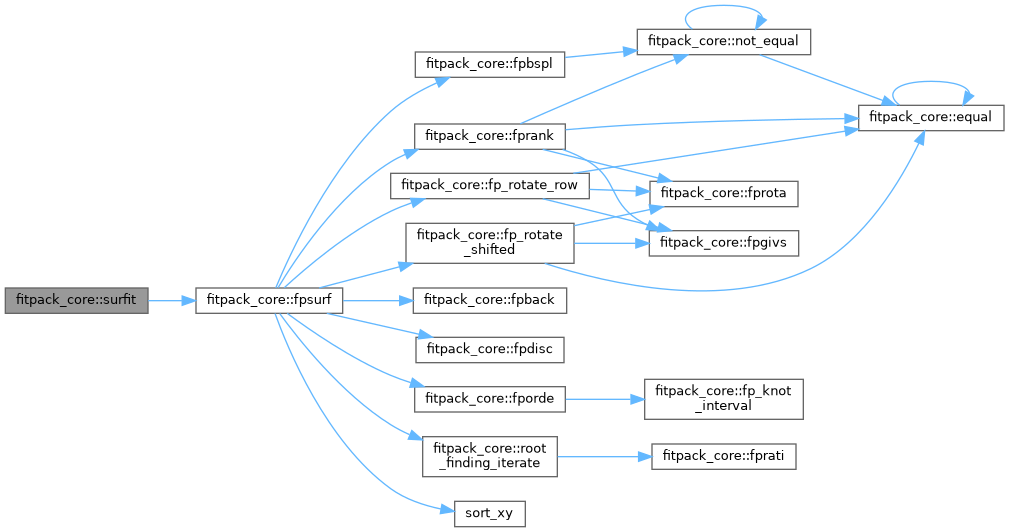
◆ swap_data()
|
private |
Swap two real values in place.
◆ swap_size()
|
private |
Swap two integer values in place.
Variable Documentation
◆ concon_maxbin
| integer(fp_flag), parameter, public fitpack_core::concon_maxbin = 14 |
◆ concon_maxtr
| integer(fp_flag), parameter, public fitpack_core::concon_maxtr = 15 |
◆ concon_qp_fail
| integer(fp_flag), parameter, public fitpack_core::concon_qp_fail = 16 |
◆ deg2rad
◆ degree_3
| integer(fp_size), parameter, public fitpack_core::degree_3 = 3 |
◆ degree_4
| integer(fp_size), parameter, public fitpack_core::degree_4 = 4 |
◆ degree_5
| integer(fp_size), parameter, public fitpack_core::degree_5 = 5 |
◆ fitpack_input_error
| integer(fp_flag), parameter, public fitpack_core::fitpack_input_error = 10 |
◆ fitpack_insufficient_knots
| integer(fp_flag), parameter, public fitpack_core::fitpack_insufficient_knots = 13 |
◆ fitpack_insufficient_storage
| integer(fp_flag), parameter, public fitpack_core::fitpack_insufficient_storage = 1 |
◆ fitpack_interpolating_ok
| integer(fp_flag), parameter, public fitpack_core::fitpack_interpolating_ok = -1 |
◆ fitpack_invalid_constraint
| integer(fp_flag), parameter, public fitpack_core::fitpack_invalid_constraint = 12 |
◆ fitpack_invalid_range
| integer(fp_flag), parameter, public fitpack_core::fitpack_invalid_range = 6 |
◆ fitpack_leastsquares_ok
| integer(fp_flag), parameter, public fitpack_core::fitpack_leastsquares_ok = -2 |
◆ fitpack_maxit
| integer(fp_flag), parameter, public fitpack_core::fitpack_maxit = 3 |
◆ fitpack_ok
| integer(fp_flag), parameter, public fitpack_core::fitpack_ok = 0 |
◆ fitpack_overlapping_knots
| integer(fp_flag), parameter, public fitpack_core::fitpack_overlapping_knots = 5 |
◆ fitpack_s_too_small
| integer(fp_flag), parameter, public fitpack_core::fitpack_s_too_small = 2 |
◆ fitpack_test_error
| integer(fp_flag), parameter, public fitpack_core::fitpack_test_error = 11 |
◆ fitpack_too_many_knots
| integer(fp_flag), parameter, public fitpack_core::fitpack_too_many_knots = 4 |
◆ five
| real(fp_real), parameter, public fitpack_core::five = 5.0_FP_REAL |
◆ four
| real(fp_real), parameter, public fitpack_core::four = 4.0_FP_REAL |
◆ fourth
| real(fp_real), parameter, public fitpack_core::fourth = 0.25_FP_REAL |
◆ fp_bool
| integer, parameter, public fitpack_core::fp_bool = c_bool |
◆ fp_comm
| integer, parameter, public fitpack_core::fp_comm = c_double |
◆ fp_dim
| integer, parameter, public fitpack_core::fp_dim = c_int32_t |
◆ fp_false
| logical(fp_bool), parameter, public fitpack_core::fp_false = .false._FP_BOOL |
◆ fp_flag
| integer, parameter, public fitpack_core::fp_flag = c_int32_t |
◆ fp_not_alloc
|
private |
Marker for unallocated arrays in communication buffers.
◆ fp_real
| integer, parameter, public fitpack_core::fp_real = c_double |
◆ fp_size
| integer, parameter, public fitpack_core::fp_size = c_int32_t |
◆ fp_true
| logical(fp_bool), parameter, public fitpack_core::fp_true = .true._FP_BOOL |
◆ half
| real(fp_real), parameter, public fitpack_core::half = 0.5_FP_REAL |
◆ idims
| integer(fp_dim), dimension(max_idim), parameter, public fitpack_core::idims = [1,2,3,4,5,6,7,8,9,10] |
◆ ifive
|
private |
◆ ifour
|
private |
◆ ione
|
private |
◆ iopt_new_leastsquares
| integer(fp_flag), parameter, public fitpack_core::iopt_new_leastsquares = -1 |
◆ iopt_new_smoothing
| integer(fp_flag), parameter, public fitpack_core::iopt_new_smoothing = 0 |
◆ iopt_old_fit
| integer(fp_flag), parameter, public fitpack_core::iopt_old_fit = 1 |
◆ ithree
|
private |
◆ itwo
|
private |
◆ izero
|
private |
◆ knot_dim_1
| integer(fp_flag), parameter, public fitpack_core::knot_dim_1 = 1 |
◆ knot_dim_2
| integer(fp_flag), parameter, public fitpack_core::knot_dim_2 = 2 |
◆ knot_dim_none
| integer(fp_flag), parameter, public fitpack_core::knot_dim_none = 0 |
◆ max_idim
| integer(fp_size), parameter, public fitpack_core::max_idim = 10 |
◆ max_order
| integer(fp_size), parameter, public fitpack_core::max_order = 19 |
◆ one
| real(fp_real), parameter, public fitpack_core::one = 1.0_FP_REAL |
◆ onep5
| real(fp_real), parameter, public fitpack_core::onep5 = 1.5_FP_REAL |
◆ outside_extrapolate
| integer(fp_flag), parameter, public fitpack_core::outside_extrapolate = 0 |
◆ outside_nearest_bnd
| integer(fp_flag), parameter, public fitpack_core::outside_nearest_bnd = 3 |
◆ outside_not_allowed
| integer(fp_flag), parameter, public fitpack_core::outside_not_allowed = 2 |
◆ outside_zero
| integer(fp_flag), parameter, public fitpack_core::outside_zero = 1 |
◆ pi
◆ pi2
◆ pi4
◆ pio2
◆ pio4
◆ pio8
◆ six
| real(fp_real), parameter, public fitpack_core::six = 6.0_FP_REAL |
◆ smallnum03
| real(fp_real), parameter, public fitpack_core::smallnum03 = 1.0e-03_FP_REAL |
◆ smallnum06
| real(fp_real), parameter, public fitpack_core::smallnum06 = 1.0e-06_FP_REAL |
◆ smallnum08
| real(fp_real), parameter, public fitpack_core::smallnum08 = 1.0e-08_FP_REAL |
◆ smallnum10
| real(fp_real), parameter, public fitpack_core::smallnum10 = 1.0e-10_FP_REAL |
◆ ten
| real(fp_real), parameter, public fitpack_core::ten = 10.0_FP_REAL |
◆ third
◆ three
| real(fp_real), parameter, public fitpack_core::three = 3.0_FP_REAL |
◆ two
| real(fp_real), parameter, public fitpack_core::two = 2.0_FP_REAL |
◆ zero
| real(fp_real), parameter, public fitpack_core::zero = 0.0_FP_REAL |